Suunto Interface
weiter zum Vyper Interface
Solution/EON Interface:
Das Bild sieht im Original besser aus (besser bei Dave Cordes nachschauen (lost) - das ist der gleiche Plan, nur schöner gezeichnet).
Nur R1 habe ich zu 1MOhm geändert, weil 560kOhm nicht auf Anhieb
funktioniert haben. U1 muß auf jeden Fall ein CMOS Typ sein.
Dave Cordes hat eine sehr gute Seite zu dem Thema. Er beschreibt auch eine Mechanik zur Kontaktierung.
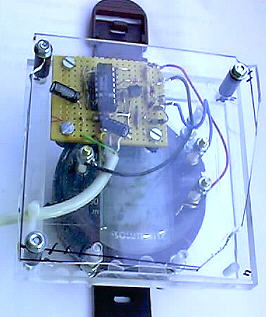
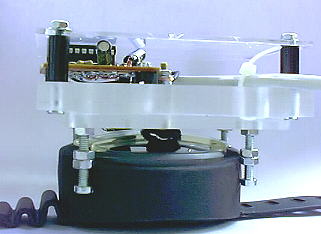
Ich hatte schon vorher einen anderen Ansatz verfolgt und auch beendet. Es sieht etwas bastelmäßig aus und ist es auch - aber es funktioniert gut.

von oben und von unten
 und von der
Seite
und von der
Seite
Als Basis dient ein Stück Plexiglas, das von einem anderen Projekt
übrig war. 4 Schrauben (M4) dienen zur Führung des Tauchcomputergehäuses.
3 Schrauben (M3) bilden die Kontakte. Durch das transparente Material ist
es einfach die Kontakte genau zu plazieren. Erst habe ich die Schraubenköpfe
als Kontakt verzinnt. Eine bessere Kontaktierung erzielte ich mit leitendem
Moosgummi, das ich mit Draht über die Schraubenköpfe gebunden
habe. Es wird verwendet um empfindliche CMOS ICs vor statischer Aufladung
zu schützen und ist in jedem Elektronikgeschäft zu finden. Es
ist ähnlich wie das Material des Original Interfaces weich.
Eine weitere Platte dient als Abdeckung. Das Kabel wir mit einerm Kabelbinder
fixiert.
Im Gegensatz zum Original Interface brauche ich die Schutzabdeckung nicht herunter zu nehmen.
Die gute Software kann man bei Suunto runterladen.
Die obige Schaltung scheint nicht bei jedem PC zu funktionieren, da die Spannungen oft zu niedrig sind. Ralph Behrens hat deshalb einige Modifikationen vorgenommen und ich präsentiere hier seinen Schaltplan (draufklicken für ein besseres Bild):
Inzwischen habe ich von Patrick L'huillier CAD Unterlagen für eine Platine zu obigem Plan bekommen : eon_if.zip
Vyper Interface
Nach langem gibt es inzwischen einen Plan für ein Vyper Interface: http://subaqua.web.cern.ch/subaqua/techniques/suunto/suunto.htm
Hier noch ein paar Anmerkungen dazu:
- Zuerst ging bei mir gar nichts. Ich habe dann über D2-D4 mehr
als 1,6V gemessen (später nur noch 1,4V). Der PC liefert +9,7V und
-7,8V. Mein Vyper hat 1,7V anliegen, wenn man auf TR-PC geht. Während
der Übertragung liegt das Signal zwischen 0 und -2V. Daher scheint
mir der Pegel an U2A Pin3 zu hoch.
Ich habe also eine der Dioden weggenommen und bekam 1,07V. U1A Pin1 habe ich dann auf 2,5V eingestellt (3,2V sind möglich mit R1 10kOhm. Damit geht es. Wie es bei einem schwachen (+-3V) seriellen Port geht, weiß ich nicht. - Wenn man den Download Dialog verläßt, geht die Spannung am Vyper auf -7V (+9V ist weg). Evt. sollte man eine Zenerdiode (4-5V) einfügen.
- Der Plan hat einen kleinen Fehler. U1A und U2A sind eigentlich die Hälften eines Chips (Pins 1,2,3 entsprechen 7,6,5)
Hier noch meine Idee für die Mechanik:


 Ich habe M3
Schrauben in ein kleines Plastikgehäuse geschraubt, das die Elektronik
aufnimmt. Als Kontakte dienen Kontaktzungen aus Platinensteckern, wie sie
z.B. auf jedem PC Motherboard zu finden sind, die ich auf die Schrauben
gelötet habe. Die Schraubenköpfe wurden außerdem etwas
abgefeilt, um gut in die Öffnung am Vyper zu passen. Die anderen zwei
Schrauben sorgen nur für eine gute Positionierung. Um die benötigte
Kontaktkraft zu erhalten, schließt man einfach das Armband des Vyper.
Ich habe M3
Schrauben in ein kleines Plastikgehäuse geschraubt, das die Elektronik
aufnimmt. Als Kontakte dienen Kontaktzungen aus Platinensteckern, wie sie
z.B. auf jedem PC Motherboard zu finden sind, die ich auf die Schrauben
gelötet habe. Die Schraubenköpfe wurden außerdem etwas
abgefeilt, um gut in die Öffnung am Vyper zu passen. Die anderen zwei
Schrauben sorgen nur für eine gute Positionierung. Um die benötigte
Kontaktkraft zu erhalten, schließt man einfach das Armband des Vyper.
Natürlich wäre die bessere Lösung ein Plastikteil, das genau in die Öffnung passt mit eingelassenen gefederten Kontakten, aber es geht auch so.
Unter http://www.geocities.com/scubadiver_roli/
gibt es eine Variation des obigen Schaltplans mit einer Gehäusebeschreibung
für Suunto ACW/Spyder/Stinger.