Projects of Rudy Norder
back to homepage | back to other peoples projects
email: Rudy Norder...............
My diving light:

 It's made
of an aluminum tube.
It's made
of an aluminum tube.
Dimensions of the light are : 110x280mm, weight above water ~ 4.1 kg and
under water ~ 1.5 kg .
Three bulbs are placed in the light ( 75, 50 and 35W). They can be turned
on and off by the switch. Because I didn't have the possibility to make
screw-threads on my lathe, I made a sort of bayonet method to open and
close the light. It works fine, but I still prefer screw-threads. The front
glass is fitted in with bison silicone kit for glass. The front glass is
8 mm (NA K) hardened and can be used to 80 meters ( likely much deeper)
A diving light shop in Germany (DEV PEIN) sells
all kind's of glasses and more stuff to be used for home building diving
parts.
 To make the
light waterproof I used 4 O rings, one for the front (can also be done
by kit I believe) one at the back panel. And 2 O-rings for the switch.
I didn't use magnetic switching, because I needed 6 switches to turn off
and on all the bulbs and because of the piece of aluminum I had. It had
a nice hole in it already (it used to be a pulley).
To make the
light waterproof I used 4 O rings, one for the front (can also be done
by kit I believe) one at the back panel. And 2 O-rings for the switch.
I didn't use magnetic switching, because I needed 6 switches to turn off
and on all the bulbs and because of the piece of aluminum I had. It had
a nice hole in it already (it used to be a pulley).
 The batterys
I used are 12 x 7 Ah nickel cadmium. They are expensive, but much better
then lead acid batterys especially when you need a lot of power. And they
last much longer.
The batterys
I used are 12 x 7 Ah nickel cadmium. They are expensive, but much better
then lead acid batterys especially when you need a lot of power. And they
last much longer.
 Because I
have ~14.4 V from the batterys the bulbs will give more light then normal.
Because I
have ~14.4 V from the batterys the bulbs will give more light then normal.
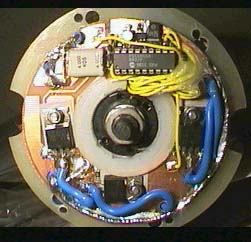 To turn the
light on and off I used a small microcontroller. The popular PIC16C84.
The lights are turned on softly, so it will extend the lifetime. The processor
also measures the voltage of the battery and will keep the effective voltage
at the bulb around 14 volts. The source code of the chip was written in
C and compiled by using the demo compiler from Hitech, which can be downloaded
(can be used 21 days). The program works fine, but I want to add the watchdog
function the processor has.
To turn the
light on and off I used a small microcontroller. The popular PIC16C84.
The lights are turned on softly, so it will extend the lifetime. The processor
also measures the voltage of the battery and will keep the effective voltage
at the bulb around 14 volts. The source code of the chip was written in
C and compiled by using the demo compiler from Hitech, which can be downloaded
(can be used 21 days). The program works fine, but I want to add the watchdog
function the processor has.
My scooter:
22.6.1998