Multicopter:
UFO 5 (Walkera) | Blade mQX (E-Flite) | Blade nanoQX (E-Flite) | Nano Quad (Revell) | Blade 200QX (E-Flite) | Blade 350QX2 (E-Flite) | Inductrix FPV (Blade) | X82 (Reely) | URUAV65 | Snapper7 | Fishpepper | Fold Drohne
Racecopter:
Nighthawk Pro 280 (EMAX) | XR280 (Rockamp) | Nighthawk X4 (EMAX) | Racecopter#1 | Spider280 (Yuki) | Tyro99 (Eachine) | Sparrow | Q90B (Amma)
nicht mehr vorhanden:
Die Bilder sind im Moment nur zum Teil von meinen
eigenen
Modellen, ansonsten aus dem Netz oder von fremden Modellen
(gekennzeichnet durch (@) )
Momentaner Status des Modells [n]:
| Status |
Bedeutung |
Status | Bedeutung | Status | Bedeutung |
| 1 |
Plan | 5 |
fertig, ungeflogen | 0 |
verkauft oder verschrottet |
| 2 |
Bausatz oder Teile | 6 |
in Benutzung | -1 |
defekt, wird repariert |
| 3 |
angefangen | 7 |
selten in Gebrauch | -2 |
defekt, ausgemustert |
| 4 |
fast fertig | 8 |
nicht mehr in Gebrauch | - |
neue Modellbeschreibung (Rumpf) |
UFO 5 (Walkera) [8]
 2G4,
zu verkaufen
2G4,
zu verkaufen
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| cm |
cm |
g |
BL |
Align(?) |
2s 1100 ? |
Das Modell bietet sich als Kameraträger an. Evt. sogar für FPV.
Beim letzten Versuch sind beim Einstecken gleich die Motoren losgerannt und es hat aus der Elektronik herausgeraucht. Ursache ist unklar. Das Modell wurde auf Gewährleistung getauscht. Beim neuen habe ich das Problem, daß er nicht mehr binden will.
Blade mQX (E-Flite) [-1,6]
 2G4
2G4
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| cm |
cm |
g |
4x Bürste |
ACX ? |
1s 500 |
Nachdem das Modell bei Vollpitch seitlich ausgebrochen ist, habe ich es eingeschickt. Danach ging es etwas besser, aber nicht wirklich gut. Inzwischen scheinen die Motoren abzuweichen, da er bei Vollpitch ausbricht und danach teilweise nicht wieder stabilisiert. Schweben ist OK.
Der erste wird neue Motoren bekommen, ein neuer fliegt sehr gut. Ich habe sogar knapp eine Rolle in der Halle geschafft, dann aber lieber aufgehört :-)
 Ich
habe jetzt mal eine FPV Kamera montiert, allerdings ist die Flugzeit
selbst mit einem neuen Akku nur sehr kurz (Zusammenhang ?).
Ich
habe jetzt mal eine FPV Kamera montiert, allerdings ist die Flugzeit
selbst mit einem neuen Akku nur sehr kurz (Zusammenhang ?).Das Flugverhalten ist im Verhältnis zu den modernen Stabis doch etwas instabiler.

Evt. war der Schwerpunkt zu sehr aus dem Lot. Ich benutze jetzt eine Halterung aus dem 3D-Drucker und lasse die Haube weg. Damit fliegt es sich besser, aber man muß aufpassen, da die Stabilisierung doch schwächer ist, als bei moderneren Coptern.

Blade nanoQX (E-Flite) [6]
 2G4
2G4
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| 5cm |
14cm |
18g |
4x Bürste |
int. |
SAFE |
1s 150 |
Nano Quad (Revell)
[7]
 2G4
2G4
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| 3cm |
4,5cm |
12g |
4x Bürste |
1s100 |
Blade 200QX (E-Flite) [-1]
 2G4
2G4
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| 11,3cm |
14,2cm (Höhe 9cm) |
g |
4x BL |
int. |
AC3X |
2s 800 |
Da der Frame relativ empfindlich ist, habe ich die Technik in einen CfK Frame transferiert. Leider habe ich aus Kostengründen die Beine nicht mitbestellt.

Irgendwas ist mit der Elektronik passiert, evt. bei einem früheren Absturz. Zuerst wollte er nicht binden, und als ich dann die obere Platine etwas fester angefaßt habe, kamen zwar LED und Motorsignale, dafür aber auch etwas Rauch. Ersatzteile sind zu teuer. Ich habe inzwischen einen integrierten Controller mit BL Reglern, den ich einbauen will.
Blade 350QX2 (E-Flite) [6]
 2G4
2G4
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| cm |
cm |
g |
4x BL |
int. |
3s 3000 |
Nighthawk Pro 280 (EMAX) [6]
 2G4, FPV
2G4, FPV
| Außenmaß |
Länge | Gewicht | Motor | Prop |
Regler |
Gyro |
Akku |
| 280mm ? |
cm |
g |
4x BL 2300Kv |
6x4,5" |
int. |
int., Naze32 |
3s 1800 |
Das Stabilisierung ist sehr gut und angenehm zu fliegen. Nur die Hochachsensteuerung war (mir) viel zu träge.
FPV habe ich mit einer geliehenen Brille getestet. Das braucht noch eine Menge Übung.
Inzwischen habe ich meine alte Brille rausgekramt. Mit einem neuen Empfänger habe ich ein Bild. Das Tuch über dem Kopf will ich nicht mehr benutzen. Ich habe ein zweites Gummiband an der Brille montiert, damit sie genau vor die Augen gepreßt wird. Leider kann ich die Augenmuscheln nicht verwenden, da die Brille (bei kaltem Wetter) sofort anläuft. Allerdings ging es auch ohne diese (zumindest bei bedecktem Himmel). Das hat auch den Vorteil, daß ich unter der Brille rausschauen kann, z.B. für Start und Landung oder auch mal im Flug um die Orientierung wiederzubekommen. Mit einer richtigen Brille mit integriertem Empfänger ist das jetzt erledigt.
Das Sendermodul machte Ärger. Ich habe es ausgetauscht. Das hatte aber nur begrenzt Erfolg. Erst ging es recht gut, dann nicht mehr. Jetzt noch ein anderes.
XR280 (Rockamp)
[-1,6,8,2]
 2G4, FPV
2G4, FPV
| Motorabstand(diagonal) | Länge | Gewicht | Motor | Props |
Regler |
Gyro |
Akku |
| 280mm |
cm |
g |
4x 2300Kv |
5x4,5"cm | 4x BL |
CC3D |
3s 1800 ? |
Mit der Standardeinstellung fliegt das Modell schon recht gut. Ich benutze Akkus unterschiedlicher Größe, die aber am Flugverhalten (subjektiv) nichts ändern.
#1
Nach einem Reglerwechsel fliegt das Modell zwar, aber nur mit sehr schwacher Leistung - noch ungeklärt. Notfalls ausschlachten. Zumindest die Motoren sollten ja gehen.#2
Da Schäden zu erwarten sind und der Preis sehr günstig war, habe ich mir noch ein zweites Modell geholt. Hier habe ich das Sendermodul etwas weiter nach vorne versetzt, damit der Akku oben mehr Platz hat.(#3)
Noch ein drittes Modell, aber eher als Teilespender. Für einen anderen Frame brauche ich Motoren und Regler, die einzeln fast so teuer wären wie hier das komplette Modell. Außerdem habe ich so noch das Kamerasystem, Gyro und einige Ersatzteile. Die Teile von #3 sind in den Nighthawk X4 gewandert.#4
noch neu, als ReserveNighthawk X4 [6]
 FPV
FPV| Motorabstand(diagonal) | Länge | Gewicht | Motor | Prop |
Regler |
Gyro |
Akku |
| 180cm |
cm |
g |
4x 2300Kv |
3bl 4,5x4" |
4x BL |
CC3D |
3s 1300 |
 Die Anleitungen
aller betroffenen Teile sind mieserabel und unvollständig.
Die Anleitungen
aller betroffenen Teile sind mieserabel und unvollständig.Der Frame läßt sich gut bauen. Allerdings ist im vorgegebenen Zustand die USB Buchse komplett verdeckt. Ich habe mal die Abdeckplatte nach unten gesetzt. Das verbessert die Lage, ich mußte den USB Stecker aber immer noch abschneiden, um ranzukommen.
Im weiteren werde ich unten noch mehr Abstandshalter einbauen.
Die Kamera vom XR280 ist etwas zu groß. Ich habe eine kleinere verbaut mit einem anderen Sendemodul oben auf dem Frame. Außerdem ein kleiner serieller Empfänger.
Im Bereich des Stabis habe ich weitere Abstandshalter eingefügt, sodaß die Buchse gut erreichbar ist. Allerdings ist die Abdeckplatte weiterhin unten. Hier muß ich noch mal größer umbauen, da mir auch die Verkabelung noch nicht so gefällt. Mit einem anderen Empfänger spart man auch noch Platz. Evt. auch einen F4 Controller statt des CC3D.
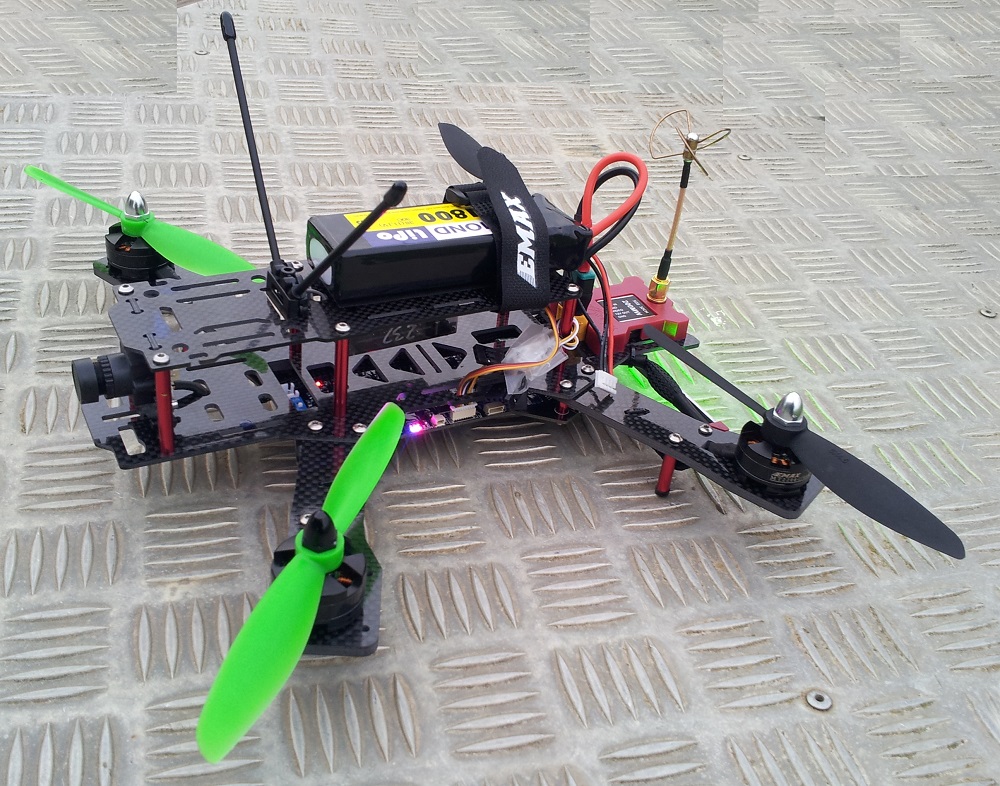
Racecopter#1 (?) [6]
 2G4, FPV
2G4, FPV
| Außenmaß |
Länge | Gewicht | Motor | Prop |
Regler |
Gyro |
Akku |
| 280mm ? |
cm |
g |
4x BL 2300Kv |
5x4,5" |
SimonK 12A |
CC3D |
3s 1800 |
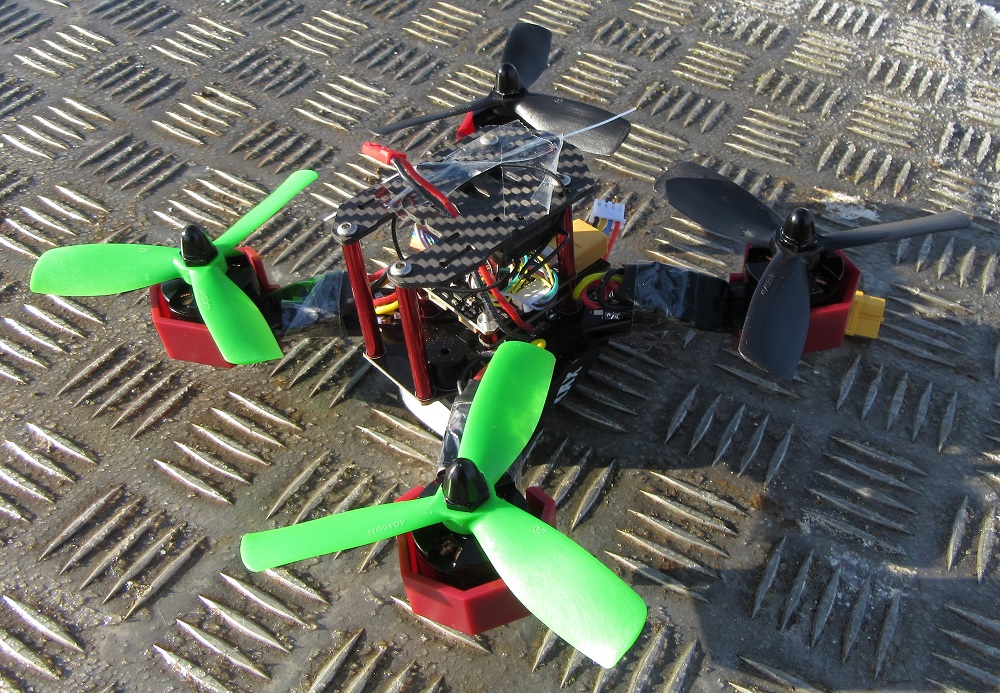
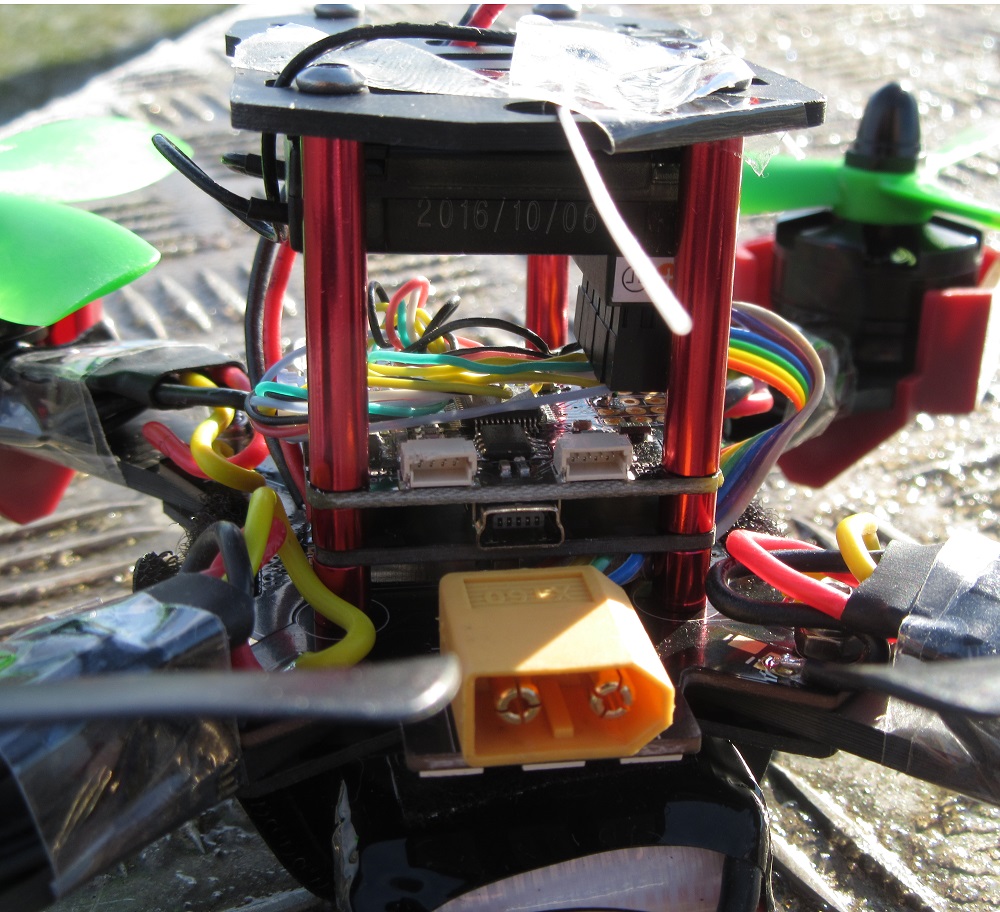
Spider280 (Yuki) [2]
 2G4
2G4
| Außenmaß |
Länge | Gewicht | Motor | Prop |
Regler |
Gyro |
Akku |
| 280mm ? |
cm |
g |
4x BL 2300Kv |
6x3" |
12A |
CC3D |
3s 1800 ? |
Tyro99 210mm (Eachine) [2]
2G4, FPV
| Außenmaß |
Länge | Gewicht | Motor | Prop |
Regler |
Gyro |
Akku |
| 210mm |
cm |
g |
4x 2206 2150Kv 31A |
5038 |
30A BLHeli_S |
F4 OSD Betaflight |
3s-5s 1800-2600 |
Inductrix FPV (Blade) [6]
 FPV DSMX
FPV DSMX
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| cm |
8,3cm |
24g |
Bürste |
integriert |
AS3X |
1s 220 |
X82 (Reely) [6]
 FPV
FPV
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| 82mm |
82mm |
22g |
615 brushed coreless | integriert |
? |
1s 300 |
URUAV65 () [6,6,6]
 FPV, brushless, Frsky und DSMX
FPV, brushless, Frsky und DSMX
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| cm |
cm |
g |
BL |
4x |
Betaflight, OSD |
1s 200-300 |
#1
Der Betrieb der Frsky Variante mit einer Horus mit OpenTX und LBT EU ist nicht ganz so trivial, auch wenn die Anleitung sagt: D16 LBT EU geht, was nicht der Fall ist. Erstmal braucht man eine installierte Firmware, die den D8 Modus zuläßt (Haken bei EU entfernen) und diesen Modus für das Sendemodul einstellen. Dann muß man den Copter auf den D8 Modus einstellen (Betaflight). Dann kann man schon mal Binden. Dann noch Umstellen der Kanalfolge auf Frsky (AE...) im Empfängermenü. Damit kamen die Kanäle durch. Vorher hat er ständig den Empfang verloren und wiedergefunden ("Telemetrie verloren - gefunden"). Inzwischen ist auch der Flip Modus in Funktion. Den sollten eigentlich auch der Spektrum URUAV und der Snapper7 beherrschen !?#2
 FrSky
FrSky#3
Spektrum RXSnapper7 () [6]
 FPV, brushless
FPV, brushless
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| cm |
cm |
g |
BL |
4x |
Betaflight, OSD |
1s 600 |
Fishpepper (Fishpepper) [5]
 FPV, brushless
FPV, brushless
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| cm |
cm |
g |
BL |
4x |
Betaflight, OSD |
1-2s 200mAh(?) |
Sparrow () [6]
 FPV, BL
FPV, BL
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| cm |
cm |
g |
BL |
4x |
Naze32 - Cleanflight |
3s 300-600 |
Ich habe jetzt Propguards verbaut (145% ?). Außerdem kleinere 3blatt Props von einem Blade Copter, da ich die originalen derzeit nicht bekomme. Inzwischen hat er einen Frsky Empfänger.

Q90B (Amma?) [6]
 FPV
FPV
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| cm |
cm |
g |
Bürste |
integriert |
F3_EVO | 1s 600 |
Mit Propguard:

Fold Drohne () [6]
 FPV, WLAN
FPV, WLAN
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| cm |
cm |
g |
brushed |
4x |
B |
1s 450 |