kleiner als 450er:
Blade msr (Eflite) | Blade MCPX (Eflite) | Blade 130X (EFlite) | T-Rex 250SE (Align-Robbe) | Hummingbird CP (Century/ACT) | ECO Piccolo (Ikarus) | Dragonfly (Reely) | Nomox 540 (Daddies Finest) [V]
450er:
T-Rex 450SE (Align-Robbe) | T-Rex 450PRO (Align-Robbe) | Solax 450 (Pichler) | Blade400 (E-flite)
ECO8 Größe/500er/600er/700er:
HeavenUp (Gensmantel) | Heaven (Gensmantel) | ECO8 (Ikarus) | E-Rix 500 (E-Rix) | T-Rex 500 GF (Align-Robbe) | Raptor 550FBL (ThunderTiger) | T-Rex 600 ESP (Align-Robbe) | T-Rex 700E (Align-Robbe)
sonstiges:
Kunstflug | Schlepp
Koaxial:
Bell 47G indoor (Graupner) | HM5#8 (Walkera) | HM5#6 (Walkera) | Blade mcx S300 (EFlite)
Sonderformen:
Copter UL C35 (Carson)
Spielzeug Helis:
PicooZ (Silverlit) | Robocopter | MicroLama V3 15g | Copter3 | FalconIII
Rümpfe:
BO-105 (ECO8) | Jetranger (ECO8-Ikarus) | Hughes 500 Rumpf | Ecureuil (MSComposites) | Causemann Rümpfe | Hummingbird FP - BK117 (Century) | Blade400 - Hughes500 | EC135 (Align) | Agusta A109 (Align) | Agusta A109 (Heli Artist) | BO105 (450er) | Hughes500(500er) | V200DQ (Walkera)
nicht mehr vorhanden:
ShuttleZ (Hirobo) | Hyperfly (Kyosho) | Carboon2 (BMI) | Hummingbird2 (Century/ACT) | Carboon400 (BMI) | Toto450 (Totonkatoys) | SJM400 | Micro Indoor Chinook (Graupner) | Kamov KA 58 (Revell) | Blade 550X Pro (E-Flite)
Die Bilder sind im Moment nur zum Teil von meinen
eigenen
Modellen, ansonsten aus dem Netz oder von fremden Modellen
(gekennzeichnet durch (@) )
Momentaner Status des Modells [n]:
| Status |
Bedeutung |
Status | Bedeutung | Status | Bedeutung |
| 1 |
Plan | 5 |
fertig, ungeflogen | 0 |
verkauft oder verschrottet |
| 2 |
Bausatz oder Teile | 6 |
in Benutzung | -1 |
defekt, wird repariert |
| 3 |
angefangen | 7 |
selten in Gebrauch | -2 |
defekt, ausgemustert |
| 4 |
fast fertig | 8 |
nicht mehr in Gebrauch | - |
neue Modellbeschreibung (Rumpf) |
Blade msr (EFlite) [7]
 FP, 2G4, zu verkaufen
FP, 2G4, zu verkaufen
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| 18cm |
20cm |
28g |
brushed |
int. |
int. |
1s 150mAh |
Inzwischen eiert er beim Schweben etwas herum. Anscheinend ist etwas krumm, möglicherweise die Paddelstange, die allerdings relativ mühsam zu tauschen ist.
 Für einige der kleineren Helis habe ich
mir einen Koffer hergerichtet:
Für einige der kleineren Helis habe ich
mir einen Koffer hergerichtet:Die vorhandenen Teiler habe ich durch 3mm Sperrholz ergänzt. Die Blades teilen sich einen Sender, da der etwas sperrig ist. Das andere sind 3x 3Kanal (Spielzeug)helis, 1x PicooZ. Über die Batterien kommt noch das große Blade Ladegerät.
Blade MCPX (EFlite) [6]
 CP, FBL, 2G4
CP, FBL, 2G4
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
FBL |
Akku |
| 24,5cm |
23,5cm |
45,5g |
brushed |
int. |
AS3X |
1s 200mAh |
In der Wohnung kann man zwar fliegen, aber mit der DX5 ist die Pitchkurve so groß (>-12 +12°), daß der Schwebepunkt sehr empfindlich ist. Inzwischen durch eine DX6i ersetzt.
Nach einigen Crashes wurden jetzt Blätter und Blatthalterwelle getauscht.

Ich habe mir das F3C Set gekauft und den Heli umgebaut. Damit ist er noch etwas schwerer, aber fürs Schweben und Rundflug reicht es und er sieht besser aus.
Blade 130X (EFlite) [-1,6]
 CP, FBL, 2G4
CP, FBL, 2G4
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
FBL |
Akku |
| 32,5cm (7,6cm Heck) |
30,5cm |
107g |
brushless |
int. |
AS3X |
2s 300-450mAh 35C |
Der Akkustecker ist schon wiedereinmal ein neuer. Ich werde versuchen einen Adapter zu bauen (im Netz findet man auch welche). Sonst halt eine zusätzliche Buchse direkt am Kabel. Es ist jetzt eine 2mm Buchsenleiste geworden. Die steckt recht fest, sonst könnte man noch ein Schnur oder Klebeband verwenden. Mit den Lemon 350 und 450 geht es recht gut, allerdings auch nur kurz. Bei 4min war der originale 300er schon praktisch leer. Auch der 450er war nach 3:30 schon unter 30% (ca. 200-300 nachgeladen). Beim nicht ganz vollen 350er hat die Unterspannungsabschaltung zugeschlagen und er ist ziemlich abrupt runtergesegelt (geringe Höhe, noch kontrollierbar, keine Schäden).
Die Mechanik vom Heck soll etwas fehleranfällig sein. Hoffentlich bleibe ich davon verschont...
...bisher schon.
Nachdem der Sender (DX6i) plötzlich entschieden hat, daß die Batterien leer sind, ist er mir ins Wasser gefallen. Anscheinend hat die Elektronik überlebt, ebenso die Mechanik. Nach 2 Tagen Trocknung (den Schrumpfschlauch und das Schaumstoffteil der Elektronik hatte ich entfernt) ging wieder alles.
Auch einen Absturz auf Rasen hat er gut verkraftet. Lediglich eine Reihe der Anlenkungen mußte ich wieder einclipsen.
Leider hat er jetzt mit dem Schütteln begonnen. Evt. reichen ja neue O-Ringe an der Taumelscheibe. Oder auch nicht. Bei näherer Begutachtung zeigte sich, daß das Heckabtriebszahnrad auf der Hauptrotorwelle schon einen guten Teil der Zähne verloren hatte. Das Metall Ersatzteil war aber schon da. Außerdem habe ich auf die Roll Anlenkungen dickere O-Ringe montiert. Jetzt fliegt er wieder wie er soll. Außerdem mußte ich das Heckrotorgehäuse kleben. Es dauerte eine Weile ein neues aufzutreiben.
Ich habe auf gelbe Blätter und HR Blätter gewechselt, die Sichtbarkeit ist aber nicht nennenswert besser geworden.
Leider bin ich einem größeren Heli in die Quere gekommen, der ziemlich Kleinholz verursacht hat :-( Deswegen und als Reserve habe ich mir noch einen 2. geholt, der inzwischen auch das metallene A-Zahnrad hat.
Die #1 ist wieder repariert. Trotzdem viele wichtige Teile (Elektronik, Servos, Antrieb) unbeschädigt waren, kam doch eine ganz schöne Summe zusammen. Beim ersten Flug danach wackelte das Heck unangenehm. Da die Blattanlenkung Spiel zu haben schien, habe ich gleich einige Teile am Heck getauscht. Vielleicht war aber auch nur ein verkehrt montiertes Heckrotorblatt schuld. Auf jeden Fall geht er jetzt wieder einwandfrei.
Und wieder hat er ein Bad genommen. Auch diesmal hat die Elektronik überlebt.
T-Rex 250SE (Align-Robbe) [6,3]
 CP
CP
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| 46cm |
43cm |
330g |
Align BL Align BL ? |
Align 15A ? |
Align GP750 uRondo ? |
3s 850 3s 850 |
Als Ersatzteillager habe ich mir günstig noch einen "normalen" 250er mit Regler und Motor besorgt.
Inzwischen bin ich sowohl in der Halle als auch draußen schon im Kreis geflogen.
 Absturz
- Blattlagerwelle, Blätter, Heckrohr u.a. -> repariert.
Interessanterweise blieb die Rotorwelle und die Heckrotorwelle heil !
Selbst der leichte Knick im Heckrohr konnte mit etwas Biegen
genügend entfernt werden. Weniger eine Frage des Geldes als des
Aufwands
bei der Reparatur.
Absturz
- Blattlagerwelle, Blätter, Heckrohr u.a. -> repariert.
Interessanterweise blieb die Rotorwelle und die Heckrotorwelle heil !
Selbst der leichte Knick im Heckrohr konnte mit etwas Biegen
genügend entfernt werden. Weniger eine Frage des Geldes als des
Aufwands
bei der Reparatur. Leichter Kunstflug geht, aber die Leistung ist nicht so toll und er reagiert recht schnell.
Die #2 wird gerade als FBL aufgebaut. Die nicht SE Version bekommt eine Reihe der Teile des SE und den V-Stabi Kopf Umbau.
Flugfehler bei #1 -> Reparatur erfolgt
Versuch eines Flips in der Halle -> Crash -> rep -> Crash -> rep -> Crash -> rep
Nach Problemen mit dem Heck, habe ich ein stärkeres Servo eingebaut, was nichts gebracht hat. Dann habe ich die Drehzahl erhöht, was das Problem gelöst hat. Evt. baue ich wieder auf das leichtere Servo zurück. Er läßt sich jetzt sehr gut fliegen, nur bei stärkeren Manövern ist das Heck nicht immer so stabil wie bei einem größeren Heli. Außerdem habe ich von BEC Steckern auf 2mm umgerüstet, was die Verluste wohl etwas verringert.
Bei einem Flug über Wasser habe ich die Orientierung verloren, und er ist baden gegangen. Eine Blattanlenkung, Blattlagerwelle und ein Servogetriebe waren defekt. Der Rest funktioniert.
#2
Der zweite 250er hat einen FBL Kopf erhalten, ist aber noch in Bau.Hummingbird CP (Century/ACT) [6,2,2,2,2]
 CP, 6Kanal, Heckmotor DD(direct drive), auch welche
zu verkaufen (leer)
CP, 6Kanal, Heckmotor DD(direct drive), auch welche
zu verkaufen (leer)
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| 52cm |
48,5cm |
300-350g |
Speed300 |
Ikarus PiccoBoard | Ikarus PiccoBoard |
3s 600-1500 |
Das beiliegende Doppelklebeband hat nicht gehalten. Schon vor dem
ersten Start haben sich die Servos gelöst. Ich habe jetzt
Heißkleber genommmen.
Die ersten Schwebeversuche waren recht erfolgreich. Der Heli steht
stabil auch direkt über dem Boden. Die Pitch/Gas Einstellungen
passen noch nicht. Ich habe selbst bei Vollpitch nur wenig Auftrieb.
Der Pitchwert bei Vollgas könnte zu hoch sein. Evt. sind die Akkus
(7x650NiMh und 2s 640) zu alt oder zu schwach, auf jeden Fall bleibt
alles kalt. Laut Internet verträgt die Elektronik auch 3s, damit
(640 oder 910, auch 1500 gehen noch vom Gewicht) geht er richtig gut.
Evt. verpasse ich dem NiMh Akku noch eine 8.Zelle. Ein
kleiner Brushless wartet auch noch.
Nach weniger als 1h Schwebezeit ist der Heckmotor eingegangen,
obwohl er nie zu heiß schien. Bei der Gelegenheit habe ich das
Getriebe mit großem Prop gegen einen langen Motor (Ikarus Piccolo
V2) mit 3x2" Prop getauscht. Der Stromverbrauch ist höher, die
Hecksteuerung subjektiv besser. Flugzeit mit 3s1350 ca. 12-15min.
Leider hat er sich jetzt eine Unart angewöhnt. Nach einigen
Minuten Flugzeit dreht das Heck ruckartig bis zu 180° zur Seite.
Die Ursache ist noch unbekannt.
Ich habe jetzt ein Ikarus PiccoBoard
eingebaut. Die Beimischung paßt noch nicht. Leider ist er mir bei
den Versuchen umgekippt und der Rotorkopf ist gebrochen. Inzwischen
repariert. Auch die Beimischung ist jetzt OK.
Beim letzten Flug hat sich der Heckrotor gelöst, aber die Landung war noch sanft. Ich brauche aber einen besseren Akkuhalter als das Original. Das wird jetzt mit 2 Gummis quer gelöst, was recht gut hält.
Auf ebay habe ich auch noch ein HL-Modul für das Picoboard gefunden. Allerdings muß ich deswegen und um die Haube drüber zu bekommen, das Picoboard in Längsrichtung montieren.
Beim nächstenVersuch haben die Servos recht komisch und sprunghaft reagiert.
ECO Piccolo (Ikarus) [4]
 FP, PiccoBoard
FP, PiccoBoard
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| 52cm |
48,5cm |
300-350g |
Speed300 |
Ikarus PiccoBoard | Ikarus PiccoBoard |
3s 600-1500 |
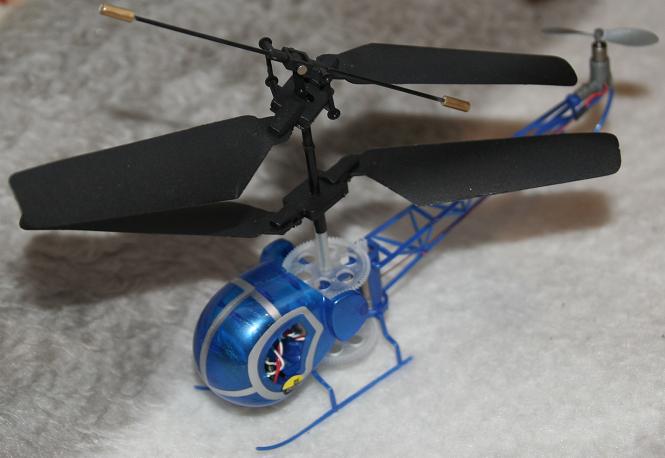
Dragonfly (Reely) [5]
 FP, 3in1
FP, 3in1
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| 52cm ? |
48,5cm |
300-350g |
Speed300 |
3in1 | 3in1 |
3s 600-1500 |
Nomox 540 (Daddies Finest) [2]
 CP, zu verkaufen
CP, zu verkaufen
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| 54cm |
48cm |
235g |
3s 800-1500 |
Blade 400 3D (E-flite) [-]
 CP
CP
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| 71,8cm |
65cm |
665g |
BL EFlite |
JAZZ 40 |
GY401 |
3s2200 |
Da ich keine Sendereinstellungen für die FX18 (V2) gefunden
habe, hier meine Werte. Allerdings bin ich noch ganz am Anfang. Also
sind diese Werte nur als Startwerte zu sehen:
Type: Heli
Reverse: 3, 6
SMitte:
K1 –9 K2 –26 K4 +7 K6 +1
Sweg: (andere auf 100)
K4: L39 R18 K5: L100 R90
D/R
K1 70% K2 80% K4 70%
Expo:
K1 -20% K2 -20% K4 0%
ST-U: Up 5min, +K3, Position 19
REGL
Mischtrimmer 4-on
Revo -26
Norm:
Gas: -100 -50 0 +50 +100
Pitch: 0 42 50 75 100
GV-1: (noch nicht benutzt)
Gas: 100 85 70 85 100 Verz. 0
Pitch: 10 29 48 74 100
Auro:
Gas –100 Pitch Min:–100 Max: +100
Taum:
HR3 Pitch –50 Roll –50 Nick –50
Funk Kan7
Para:
DRSC 4 Mode2 D-UM Normal D-TR OFF
Das Expo habe ich inzwischen rausgenommen. Auch das Revo. Des weiteren habe ich die Gaskurve (Norm) in der Mitte angehoben um mehr Drehzahl zu erreichen (ca. -100 -20 35 80 100, in Zukunft wohl noch mehr). Das ist aber noch nicht der Endwert. Alternativ könnte man auch auf einen drehzahlregelnden Regler umsteigen.
Mit der Gyroeinstellung komme ich auch noch nicht zurecht. Im Normalmodus ist er recht träge. HH habe ich noch nicht eingestellt.
Leider ist er mir bei einer Landung im Schnee umgekippt, und dabei ist die Hauptrotorwelle verbogen worden. Und gleich nochmal - diesmal hat es ein Servo und die Blattlagerwelle erwischt. Vorher habe ich aber noch die ersten Rundflüge gemacht.
Das gleiche Servo habe ich nicht bekommen, aber die ESKY (z.B. auch Conrad) Digitalservos scheinen identisch zu sein. Zumindest im direkten Vergleich bewegen sie sich genauso. Bei der Gelegenheit habe ich das Heckservo gegen ein Futaba 3154 getauscht, das ist schneller und deutlich präziser. Die Meinungen im Internet gehen auseinander, ob man damit die Digitalservoeinstellung (275Hz) nutzen kann.
Das HH geht gut, aber ich brauche noch einen eigenen Speicherplatz mit anderer Trimmung. Um das zu umgehen, brauche ich eine bessere mechanische Einstellung.
Bei wärmerem Wetter hat der Regler das im Internet beschriebene Verhalten gezeigt und wegen Überhitzung abgeschaltet. Ein anderer Regler war leider falsch programmiert und so ist der Heli beim Einschalten unkontrolliert hochgelaufen und hat die Rotorblätter und Paddelstange und Blattwelle zerstört.
 Nach der Reparatur hatte ich kurz nach dem Abheben wilde
Störungen, auf jeden Fall keine Kontrolle und bin jetzt wieder
soweit als wie zuvor. Allerdings hat es auch noch das Landegestell
erwischt. Die Reparatur ist fast abgeschlossen.
Nach der Reparatur hatte ich kurz nach dem Abheben wilde
Störungen, auf jeden Fall keine Kontrolle und bin jetzt wieder
soweit als wie zuvor. Allerdings hat es auch noch das Landegestell
erwischt. Die Reparatur ist fast abgeschlossen.Nach komischen Effekten flog das Eflite Gyro raus und der Regler ist ein PIX3000 (kein echter Regler). Dazu noch 2G4 und es läuft wieder alles. Inzwischen bin ich damit schon meinen ersten Looping geflogen.
Anscheinend war der Regler (BEC?) überfordert. Nach meiner ersten Rolle hat er abgestellt. Und da ich noch keine Autorotation kann, gab es einen Platsch, der allerdings nur begrenzte Schäden zur Folge hatte.
Am nächsten Tag gings weiter. Auch der SPIN33 hatte Probleme mit der Temperatur. Weiter außen montiert ging es dann. Die Einstellung des Reglermodus hat mir aber Probleme bereitet, und bei einem Test stieg Rauch aus dem Regler.
 Mit einem JAZZ40 lief es besser. Allerdings
habe ich beim Einstellen
der Drehzahl in der Wiese mit dem Heckrotor aufgesetzt, und er hat
blockiert. Das hat das Heckantriebsritzel abgeschliffen. Wurde
getauscht. Mit einem guten Drehzahlregler zu fliegen ist schon angenehm
!
Mit einem JAZZ40 lief es besser. Allerdings
habe ich beim Einstellen
der Drehzahl in der Wiese mit dem Heckrotor aufgesetzt, und er hat
blockiert. Das hat das Heckantriebsritzel abgeschliffen. Wurde
getauscht. Mit einem guten Drehzahlregler zu fliegen ist schon angenehm
!Ich werde jetzt den Übergang machen, d.h. den Blade in einen Hughes500 Rumpf und normal mit den T-REX450 fliegen.
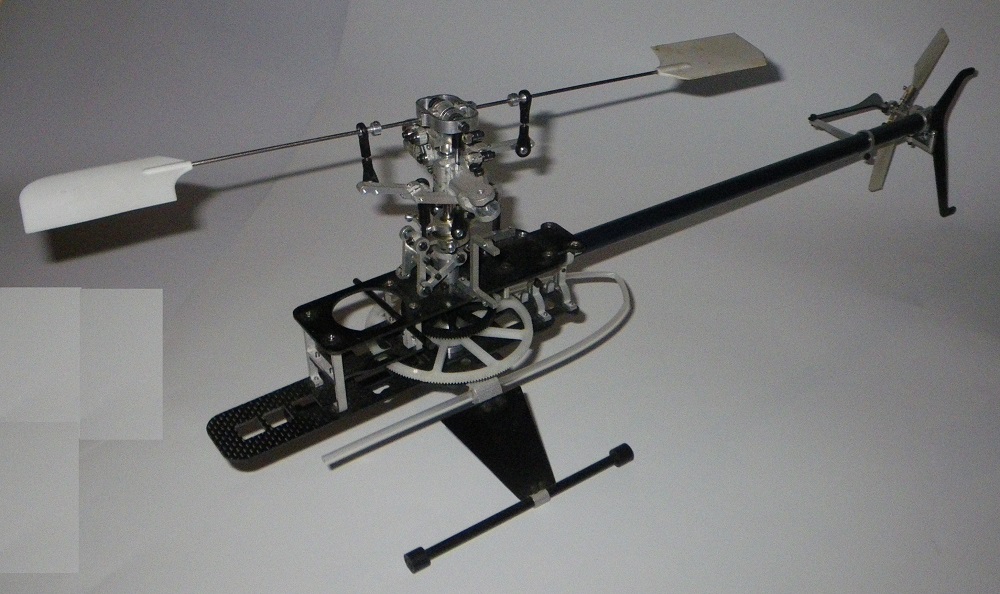
T-Rex 450SE V2 (Align-Robbe,?,CopterX)
[6,-1,-1,6,6]
 #1 CP
#1 CP
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro/FBL |
Akku |
| cm |
cm |
g |
BL Clone 3600 - 13Z BL BL BL BL CopterX |
Robbe Roxxy 940-6 Jazz40 Jeti Advance 40 (wird sich noch ändern Jazz40 BD40A ??? |
GP750 + FS550 DigiSpeed Microbeast + FS61 DigiSpeed GY401 + ? uRondo + FS61 DigiSpeed GP750 + FS61 DigiSpeed |
3s 2200-2700 |
#1 - Basis
Mal wieder ein Sonderangebot. Der Toto450 war
noch nicht fertig, der
Blade400 mal wieder beschädigt. Also dann mal
das Original(?) der
Größe. Die Teile sind besorgt, der Antrieb ist ja dabei.
Dazu noch ein Clon (#2), der nur minimal abweicht. Ich baue jetzt beide
parallel auf (#1 und #2). So habe ich Reserve, wenn mal wieder
was schief geht :-)Der T-Rex450 fliegt schon deutlich präziser und angenehmer als der Blade400. Evt. bekommt er noch einen Jazz Regler, obwohl der Originalregler zumindest mit einer Gaskurve sehr gut geht.
Jetzt hatte auch der Align T-Rex seinen ersten Absturz. Einen Rückenflugversuch konnte ich nicht sauber beenden und abwärts ging es. Der übliche Schaden an Wellen und Blättern. Repariert, aber läuft noch nicht richtig (Kopf).
Und nochmal fast das gleiche bei einer stehenden Rolle. Wieder repariert. Rotorwelle und Paddelwelle getauscht. Alle Servos Karies.
Der Heckriemen ist wohl irgendwo angestoßen. Er ist ausgefranst und im Flug war verminderte Leistung zu bemerken. Jetzt ist er locker. Ob das der Grund oder nur eine Auswirkung ist, kann ich noch nicht sagen. Repariert, aber beim ersten Versuch den falschen Modellspeicher :-( Neue Reparatur.
Ich habe auf ebay einige günstige (eher billige) Rotorblätter gekauft. Eines davon hat sich als komplett verzogen herausgestellt ! Also muß ich in Zukunft auch darauf kontrollieren. Gewichtsunterschiede im Bereich von 0,1-0,3g (bei ca. 24-32g) merkt man dagegen an der Rotorblattwaage nicht.
Ein mißglückter Flip führt zur nächsten Reparatur.
Nachdem für Kunstflug der Schub etwas gering war, habe ich mal ein größeres Ritzel (13 statt 12) genommen. Der Motor wird relativ warm und nach wenigen Minuten nimmt die Leistung ab, evt. vom Regler runtergeregelt. Hier soll jetzt ein Roxxy und ein anderer Motor kommen.
Der erste Roxxy 940-6 hat zu einem Absturz geführt, zum Glück in weiches Gras aus geringer Höhe. Anscheinend ist das BEC defekt. Nach dem Log war die BEC Spannung vorher schon schwach und ist beim ersten Steigflug komplett zusammengebrochen.
Mit einem anderen gleichen Regler ging es dann, die gemessene Schwankung der RX Spannung ist minimal. Allerdings ist der Gasweg etwas komisch, er läuft erst spät an und reagiert dann sehr empfindlich. Nach 5min war der Akku recht leer, der Strom also deutlich höher, auch die maximale Drehzahl wird recht hoch angezeigt (3600). Als nächstes habe ich den Governor aktiviert. Das geht schon deutlich besser (im Kunstflug). Allerdings ist auch der Strom entsprechend gestiegen. Jetzt sind keine 5min mehr drin.
Die Pitchwerte sind korrigiert worden, allerdings ist die Leistung auch mit 3s2700 etwas begrenzt. Positiv reicht es, negativ aber etwas schwächer. Ich habe nicht das Gefühl, immer ausreichend Schub zu haben, wie bei anderen Helis (#4, 700er). Vielleicht war das auch der Akku. Beim letzten Flug ging es recht ordentlich.
#2 - ???
 Servos habe ich noch, Motor ist auch
vorhanden. Ebenso Gyro und
Heckservo. Nur die guten Regler sind etwas Mangelware. Der Clone ist
etwas weiter vormontiert als das Original allerdings kaum mit
Schraubensicherung, d.h.
ich muß fast alles wieder lösen.
Servos habe ich noch, Motor ist auch
vorhanden. Ebenso Gyro und
Heckservo. Nur die guten Regler sind etwas Mangelware. Der Clone ist
etwas weiter vormontiert als das Original allerdings kaum mit
Schraubensicherung, d.h.
ich muß fast alles wieder lösen.Der Clone zeigt kaum Abweichungen vom SE V2, allerdings ist die von mir verwendete Antriebskombination mies. Der Regler wird nach kurzer Zeit sehr warm, und ich habe Angst, daß er abschaltet. Im weiteren hat er einen Jazz40 bekommen, aber auch der Motor ist nicht der beste.
 Die
#2 hatte auch einen Absturz - wieder repariert. Trotz
hinzugefügter Paddelgewichte ist der Heli sehr nervös. Ich
hab das Expo stark erhöhen müssen.
Die
#2 hatte auch einen Absturz - wieder repariert. Trotz
hinzugefügter Paddelgewichte ist der Heli sehr nervös. Ich
hab das Expo stark erhöhen müssen.Der nächste Crash war nicht im Flug. Ich hatte ihn gerade gelandet und wollte die Drehzahl etwas reduzieren, als er (evt. durch eine Böh) umgekippt ist. Die Schäden sind eher gering. Die Paddelgewichte habe ich verdoppelt.
Die Akkus werden immer noch recht heiß. Evt. taugt der Motor nichts. Der Kopf ist schwergängig und der Regler schaltet früh ab. Ob wegen BEC Problemen oder weil der Motor überlastet, muß ich noch herausfinden.
Nach einigen Korrekturen lief er eigentlich ganz gut, dann aber ist der Riemen gerissen und es heißt wieder mal Reparatur. Das Kopfstück war verbogen. Der Einfachheit halber einen neuen kompletten Kopf. Jetzt geht er wieder und wartet auf den Einbau in einen Rumpf. Der letzte Testflug davor war wieder mal ein Crash (Licht zu mies). Einige Wellen und Getriebe sind hin. Bei der Gelegenheit kamen gleich digitale Servos rein, damit auch FBL geht.
Jetzt ist ein uRondo mit einem RJX 2bl. Kopf montiert. Erstflug weitgehend problemlos. Allerdings war es schon recht dunkel, daher ging nicht mehr als leichter Rundflug. Bei einem weiteren Flug hat er sich als sehr gut zu fliegen erwiesen. Auch Kunstflug geht wie auf Schienen, nur die Pichwerte bei Normal und Idle1 sind noch nicht korrekt und die Heckempfindlichkeit stimmt noch nicht ganz.
Inzwischen hat er Align 3D Blätter bekommen und ich habe die Taumelscheibe, die Spiel zeigte getauscht. Ich habe auch noch bemerkt, daß das Rotorkopfzentralteil vertikales Spiel hat. Die seitlichen Schrauben der Taumelscheibenmitnehmer, die die Welle klemmen sollten, schaffen das anscheinend nicht.
 Und
wieder ein Absturz. Die Grundfunktionen am Boden waren OK. Der Start
war schon etwas wackelig. Danach hat die Pitchfunktion sehr eigenartig
gearbeitet, die anderen Funktionen nur zäh !? Kontrolle war
praktisch nicht existent. So mußte ich ihn dann halbwegs sicher
erden. Die Blätter sind hin, die Hauptrotorwelle vermutlich auch,
der Rest sieht nicht so schlimm aus. Wieder repariert.
Und
wieder ein Absturz. Die Grundfunktionen am Boden waren OK. Der Start
war schon etwas wackelig. Danach hat die Pitchfunktion sehr eigenartig
gearbeitet, die anderen Funktionen nur zäh !? Kontrolle war
praktisch nicht existent. So mußte ich ihn dann halbwegs sicher
erden. Die Blätter sind hin, die Hauptrotorwelle vermutlich auch,
der Rest sieht nicht so schlimm aus. Wieder repariert.Als nächstes probiere ich mal ein Microbeast aus. Dann kann ich die Flugeigenschaften auch direkt mit dem 700er vergleichen.
Mit der Grundeinstellung lief er ganz brauchbar. Allerdings hat sich wohl ein Kugelkopf der Taumelscheibe gelöst und der Taumelscheibenmitnehmer ist abgebrochen. Ich habe auch einige Schrauben und die Lager eines Blatthalters getauscht.
Danach war das Schweben OK. Kurz darauf allerdings ist er völlig außer Kontrolle geraten. Nach einigem Kampf landete er im Maisfeld. 2 Servos sind beschädigt, ansonsten sieht es wohl gut aus.
Momentan geht meine Vermutung in Richtung des BECs des Reglers, das etwas knapp für FBL ist (1,5-2A?). Andererseits hat die #4 den gleichen Regler und funktioniert !? Auf jeden Fall bekommt er mal ein externes BEC oder einen Roxxy Regler mit mehr BEC Strom. Bei der #4 werde ich mal BEC Strom und Spannung messen.
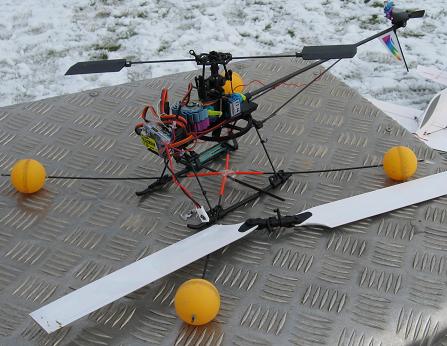
#3 - Wasserflug
 Nun noch eine #3: ein CopterX, ein ziemlich identischer Nachbau.
Gebraucht: ein Servo war defekt, gutes Gyro. Fliegt auch schon.
Nun noch eine #3: ein CopterX, ein ziemlich identischer Nachbau.
Gebraucht: ein Servo war defekt, gutes Gyro. Fliegt auch schon. Inzwischen
habe ich aus Badenudeln und CfK Rohren Schwimmer gebaut und auf der #3
montiert.
Pitch muß erhöht werden und er ist ein wenig
empfindlicher, aber ansonsten wenig Einfluß. Landen am Wasser ist
kein Problem, beim Starten des Motors aber dreht er sich wie wild und
man muß stark mit Seite korrigieren. Fahren am Wasser ist fast
unmöglich. Der Heli wird durch den Heckrotor nach links
abgetrieben. Für andere Richtungen muß man ihn fast umkippen.
Inzwischen
habe ich aus Badenudeln und CfK Rohren Schwimmer gebaut und auf der #3
montiert.
Pitch muß erhöht werden und er ist ein wenig
empfindlicher, aber ansonsten wenig Einfluß. Landen am Wasser ist
kein Problem, beim Starten des Motors aber dreht er sich wie wild und
man muß stark mit Seite korrigieren. Fahren am Wasser ist fast
unmöglich. Der Heli wird durch den Heckrotor nach links
abgetrieben. Für andere Richtungen muß man ihn fast umkippen.
Bei einem unglücklichen Manöver ist es passiert - er ist auf dem Wasser gekentert. Aber der Regler hat es überlebt ! Ich führe das darauf zurück, daß er sehr schnell komplett untergetaucht wurde und ich ihn noch unter Wasser abgesteckt habe. Anscheinend wurden nur die Rotorblätter leicht beschädigt, der Rest funktioniert noch.
Inzwischen konnte ich schon einen Looping damit fliegen. Bei einer Pirouette in Fahrt schlägt der Windfahneneffekt trotz HeadingHold zu. Nach etwas über 180° Drehung wird der Heli mit einem Ruck wieder gerade gerichtet. Nachdem er bei einem Flug außer Kontrolle geraten ist und ins Wasser fiel, ist zumindest der Regler defekt und einiges verbogen.
Inzwischen wieder repariert. Soviel war gar nicht kaputt. Als Regler lasse ich einen ganz normalen ohne Drehzahlregelung, weil dieser Heli sowieso kaum Kunstflug macht und so das Hochfahren des Rotors am Wasser feinfühliger machbar ist. Inzwischen haben zwei Regler im Flug abgeschaltet -> Wasserung, defekt.
#4 - FBL
 Mit Teilen aus
verschiedenen ebay Käufen
habe ich einen
weiteren Clone aufgebaut. Das Chassis ist aus CfK, Alu Heck. Damit will
ich
einen 3blatt Rotor (später evt. auch einen 4blatt) testen.
Stabilisierung durch ein uRondo.
Mit Teilen aus
verschiedenen ebay Käufen
habe ich einen
weiteren Clone aufgebaut. Das Chassis ist aus CfK, Alu Heck. Damit will
ich
einen 3blatt Rotor (später evt. auch einen 4blatt) testen.
Stabilisierung durch ein uRondo.Die ersten Versuche waren wenig erfolgreich. Die Ausschläge waren wohl zu groß. Ich habe auch eine virtuelle Taumelscheibenverdrehung hinzugefügt. Leider hat das Heck eine Störung entwickelt, daher konnte ich nicht weitertesten.
Mit korrigiertem Heck war der Testflug leider auch nur kurz :-( Die Einstellung war wohl unbrauchbar.
Ich habe jetzt einen zum 2blatt umgebauten 4blatt Kopf montiert. Die Gestänge haben etwas unglückliche Winkel, sodaß viel Spiel ist. Außerdem hat auch der Taumelscheibenmitnehmer zuviel Spiel.
Der Erstflug war etwas besser als vorher, aber nicht wirklich kontrolliert.
 Ich habe erstmal die
aktuelle SW(4.1) eingespielt und einen Rotorkopf von RJX montiert.
Ich habe erstmal die
aktuelle SW(4.1) eingespielt und einen Rotorkopf von RJX montiert.Damit läßt er sich fliegen. Das Abheben ist ein Problem. Am besten hebt man (wie beschrieben) mit einem Ruck und ohne Nick/Roll ab. Dann kann die Stabilisierung arbeiten.
Die Einstellung ist recht empfindlich. Ich habe bisher mit 2 Schiebereglern gearbeitet, das ist nicht präzise und reproduzierbar genug. Außerdem sollte ich auf eine Drehzahlregelung übergehen, das wird dem Stabi wohl helfen.
Die Schieberegler habe ich inzwischen im Weg begrenzt und taste mich an eine brauchbare Einstellung ran. Rundflug ging schon, aber er ist noch etwas unruhig. Bisher bin ich mit relativ niedriger Drehzahl geflogen. Evt. geht es mit höherer besser.
Mit höherer Drehzahl (aber auch niedriger) und sehr genauer Einstellung der Empfindlichkeitswerte fliegt er jetzt ganz gut, auch Kunstflug geht.
Leider ist er am Ende eines Flugs eingeschlagen. Ich konnte einen Flip nicht rechtzeitig abfangen. Evt. war der Akku schon zu schwach, oder die Drehzahl im Schwebemodus war zu klein (Pitch wäre genug). Das Heck hat wohl die Hauptenergie aufgenommen und ist sehr verformt, die Blätter haben überlebt. Die meisten Gestänge am Kopf ab oder gebrochen. Ebenso einige Getriebe. Ein weiterer RJX Kopf ist mir in den Schoß gefallen (-> #2). Die Lager der Blattlagerwelle liefen rauh und sollten getauscht werden. Das ist aber ein ziemliches Problem. Man braucht viel Gewalt um sie rauszuschlagen, und es steht kaum etwas als Ansatzpunkt hervor. Zwei Lager habe ich leider zerstört und der äußere Ring blieb drin. Einen konnte ich schon rausdremeln, der andere sträubte sich länger. Alles wieder repariert. Die Taumelscheibe steht etwas tief, aber die Anlenkstangen sind nicht in jeder Größe leicht zu finden. Hier sollte ich noch optimieren, da die TS unten bei zyklischen Ausschlägen anschlägt. Wäre aber für einen Scaleheli egal. Den zweiten RJX Kopf habe ich mit ganz normalen Anlenkungen eingebaut, nur die obersten Gestänge mußte ich ein wenig rausdrehen. Also ist hier wohl was schief gelaufen und sollte bei Gelegenheit korrigiert werden.
Nachdem die #4 soweit gut flog, habe ich jetzt wieder den 3bl. Kopf montiert und eingestellt. Das Ergebnis war sowohl spektakulär als auch frustrierend. Der Heli hatte noch nicht die volle (Normal) Drehzahl erreicht, als wohl ein Blatt am Blatthalter brach. Durch die entstehende Unwucht wurde die Welle massiv verbogen und die anderen Blätter brachen ebenso und flogen ca. 10m weit weg - zum Glück ohne jemanden zu treffen.
Nach diesem Ereignis habe ich wieder den 2blatt Kopf montiert. Das Heck schwingt leicht. Der Heckschieber hat etwas Spiel, das ich auch mit Originalteilen nicht wegbekomme. Das Schwingen ist allerdings recht gering und stört nicht allzusehr.
An sich flog er jetzt auch im Kunstflug sehr gut. Allerdings war plötzlich die Leistung weg. Es stellte sich heraus, daß der Freilauf durchrutscht. Getauscht.
Die Leistung ist sehr gut. Ich habe jetzt Align 3G (FBL) Blätter drauf. Ich weiß aber nicht, inwieweit sie sich auswirken. Das Abheben ist immer noch sehr wackelig und kein Vergleich zum 700er, der einfach nur senkrecht hoch geht. Er will immer erstmal seitlich kippen. Evt. ist die Grundtrimmung nicht korrekt ? Also einfach hochreißen, dann paßt alles. Wenn man einen 600er oder 700er geflogen ist, fliegt er sich aber sehr nervös und schnell reagierend.
#5 - Nachtflug
 Ein weiterer Clone, sehr ähnlich zu #2.
Einige Align Teile,
anderes von CopterX, der Kopf paßt aber nicht zu den CopterX
Manuals. Komponenten untere Mittelklasse.
Ein weiterer Clone, sehr ähnlich zu #2.
Einige Align Teile,
anderes von CopterX, der Kopf paßt aber nicht zu den CopterX
Manuals. Komponenten untere Mittelklasse.Das ist mein Nachtflugheli geworden.
Ich habe erstmal ein paar Teile getauscht. Ein besseres Gyro und Heckservo, Heckriemen weniger straff, Rotorblätter GfK, neue Paddelstange und Hauptrotorwelle.
Der Start war dann unkompliziert, wenig Trimmen nötig, allerdings Spurlaufabweichung. Der Kopf hatte die oberen 4 Verbinder als fixe Teile, die nicht einstellbar waren !? Die oberen 2 habe ich getauscht. Allerdings hat jede Änderung eine zu starke Auswirkung gehabt und ich habe kein brauchbares Setup gefunden.
Ich hatte keine Lust auf weitere Spiele und tauschte den ganzen Kopf. Jetzt geht er einwandfrei.
Die Nachtflugblätter sind montiert. Die weitere Beleuchtung ist fertig.
Da ich genug von Gaskurve hatte, wollte ich den vorhandenen, unbekannten Regler tauschen. Nach Demontage konnte ich den Typ ablesen und fand eine Anleitung im Netz, die sogar von Governor spricht. Also doch wieder der alte Regler, nur anders eingestellt. Der Governor funktioniert recht gut. Nur in Grenzbereichen habe ich Probleme. Teilweise ist mir das Heck weggedreht. Das kann aber unterschiedliche Ursachen haben: Akku, Regler, Motor zu schwach, zu kalt (0°C), Riemen rutscht durch, Drehzahl im oberen Bereich nicht sauber gehalten... Ich werde wohl mal mein Unilog montieren und mir die Werte ansehen. Bei einem andern Heli habe ich jetzt gesehen, daß bei diesen Temperaturen der Heckriemen schon sehr lose ist.
T-Rex 450PRO (Align-Robbe) [6,6]
 CP
CP
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| cm |
cm |
g |
BL Align |
Roxxy 950 Align |
GP780 + Align DS520 GP780 + Align DS520 |
4s1800 3s2200 |
Für mehr Power habe ich vom vorhandenen (13) Ritzel auf das im Manual genannte Ritzel (14) umgerüstet und den Governer Mode aktiviert. Der Schub hat zugenommen, ist mir aber noch zu schwach. Ich werde wohl einen anderen Motor nehmen müssen.
Ich habe etwas gemessen und mit dem 14er Ritzel komme ich nur auf stabile 2600U/min. Da sehe ich kaum Einbrüche bei Vollpitch. Drehe ich die Drehzahl höher, sehe ich entsprechende Einbrüche bis auf etwa 2600. Entweder reicht die Leistung nicht für mehr, oder das Ritzel paßt nicht. Ich werde mal sehen ob ich ein 15er finde. Alternativ wäre noch eine 4s Variante möglich. So hätte ich bei gleichem Strom deutlich mehr Leistung.
Nach einem weiteren Testflug mit unbefriedigendem Verhalten, habe ich alle Einstellungen nachgestellt und dabei bemerkt, daß 2 der DS-410M beträchtliches Spiel haben, 1-2mm an der Anlenkstange ! Neue Servos sind montiert und eingestellt. Der Tausch des Nick Servos ist ein Krampf. Mit demontierter Gyroplattform ging es geradeso heraus.
Nachdem auch mit einem 15er Ritzel die Leistung nicht mehr wurde - die Drehzahl nicht stabil war - habe ich jetzt ein 12er Ritzel und nehme 4s. Damit ist der Drehzahleinbruch selbst bei hoher Belastung nur im Bereich von 100U/min (bei 3000U/min). Die Akkus werden aber schon ganz schön gefordert. Um den Schwerpunkt ohne große Umbauten zu halten, darf man aber nur sehr leichte Akkus nehmen.
Crash wegen Flugfehler. Repariert. Das Motorritzel ist zweimal durchgerutscht. Ich habe jetzt die Welle abgeflacht. Der Schieber am Heck ist nun aus Alu, das Spiel aber kaum geringer. Das Heck pendelt nur mehr sehr leicht.
#2
 Wegen
einer Hobbyaufgabe kam
dieser recht günstig zu mir. Wahrscheinlich für einen der
Scale Rümpfe. Ich habe ihn jetzt als ersten Heli in die Horus X12S
programmiert. Das paßte auf Anhieb bis auf Kleinigkeiten. Derzeit
fliege ich ihn mit 3s2200 Akkus, die dabei waren. Ich habe auch noch
einen FBL Umbausatz für den Kopf.
Wegen
einer Hobbyaufgabe kam
dieser recht günstig zu mir. Wahrscheinlich für einen der
Scale Rümpfe. Ich habe ihn jetzt als ersten Heli in die Horus X12S
programmiert. Das paßte auf Anhieb bis auf Kleinigkeiten. Derzeit
fliege ich ihn mit 3s2200 Akkus, die dabei waren. Ich habe auch noch
einen FBL Umbausatz für den Kopf.Solax 450 (Pichler) [-]
 CP
CP
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| 70cm ? |
cm |
g |
Align |
Align. |
GY-401 |
3s2200 |
Soll den EC135 Rumpf bekommen und wurde dafür schon teilweise zerlegt.
HeavenUp (Gensmantel) [7]
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| 90cm |
cm |
~1600g |
|
10xSubC oder 3LiPo |
Heaven (Gensmantel) [4,3?]
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| 90cm |
cm |
~1600g |
|
10xSubC oder 3LiPo |
Ein weiterer Heaven (ich muß noch schauen ob normal oder UP) ist dazugekommen. Der Preis war erschwinglich, der Zustand gut und es gehörten eine Unmenge Ersatzteile dazu. Leider nicht ganz gleichmäßig verteilt.
ECO8 (Ikarus) [7,2]
 CCPM,
Heck über Riemen
CCPM,
Heck über Riemen
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| 107cm |
cm |
~1800g mit NiCd, mit 3s4500 1580g |
FUN500-19 FUN500-19 |
Smile 45-6-12 Opto |
GY-401 + MPX |
3-4LiPo |
Eigentlich erst als Ersatzteillager für den Heaven gedacht, habe
ich
ihn
dann mit einem Brushlessmotor ausgestattet (FUN500) und
ausschließlich
benutzt. Verschiedene Alu Tuningteile (Taumelscheibe, Rahmen, Heckring,
Motorplatte). Ich habe einige Gyros ausprobiert: Ikarus MiniGyro (ging
gut, aber kein Heading Hold), CSM ICG360 (ließ sich nicht
vernünftig
einstellen), Robbe 3D-Gyro (hat auch Ärger gemacht, bis ich die
Heckrotorblätter
gekürzt habe), Futaba GY-401 mit 9251.
Schweben geht recht gut, auch erste Rundflüge habe ich gemacht.
Dabei
gab es allerdings einige Abstürze und der Heli lag dann
längere
Zeit.
Inzwischen habe ich einen Alu Rotorkopf montiert, die Einstellungen
sind aber noch nicht perfekt. Außerdem hatte ich Probleme mit
Heckzucken. Einige Experimente mit ext. BEC bzw. Empfängerakku
sind noch nicht abgeschlossen. Spätestens seit der Kombination
GY-401 mit 9251 dürfte das interne BEC (Kontronik Smile) an der
Grenze sein. Ich nehme jetzt einen Opto Regler mit externem BEC. Als
Servo wieder ein MPX.
Das obige Bild zeigt übrigens meine Indoor Schwebeanlange :-) Das
Kreuz verhindert das Umkippen, die Position wird durch die
Gummischnüre am Brett gehalten. So ist Schweben, leichte seitliche
Bewegung und etwas Drehung möglich.
Auf ebay habe ich einen ECO8 Rohbau ersteigert (#3). Die Seitenteile
mit
futuristischer Formgebung aus CfK. Das Landegestell ein einzelner CfK
Bügel, CfK Heckrohr. Eigentlich würde ihm der Alukopf gut
stehen :-) Kann man ja noch tauschen, da der Kopf recht leicht
abzumontieren ist. Im Ersatzteilvorrat fanden sich alle fehlenden
Teile. Nur eine ALU Motorplatte wäre noch schön.
Der #1 ECO8 hatte mal wieder einen Erstflug mit Alukopf und Lipo.
Lief soweit ganz gut, Drehzahl paßt (1500U/min), Pitch
anscheinend noch zu gering. Leider ist er mir bei Wind nach einer
Pirouette über den Kopf geflogen, was in einem Absturz endete (2
Servogetriebe, Heckrohr, Blattlagerwelle, Zahnrad, Rotorblätter,
Heckrotorblätter, Landegestell und ein paar Kleinteile). Noch habe
ich genug Ersatzteile. Allerdings gehen mir die Heckrohre langsam aus,
und die Händler in der Gegend haben keine ECO8 Teile mehr lagernd.
Das Landegestell ist jetzt eines vom T-REX500. Bis ich mich sicherer
fühle, nehme ich die noch verbliebenden Holzblätter.
Mit 3s war es recht lahm, kaum Reserven beim Abfangen. Mit 4s geht es
wesentlich besser. Allerdings wackelt das Heck komisch herum, darum
kümmere ich mich später.
E-Rix 500 (E-Rix) [6]
 CP, Heck Riemenantrieb
CP, Heck Riemenantrieb
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| 96cm |
85cm |
1750g ? |
Erix |
Erix70 |
gj10s + Savöx |
6s 2400 |
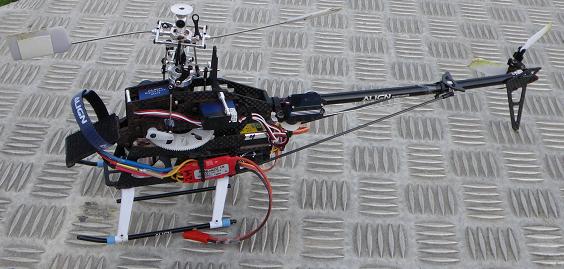
T-Rex 500 GF (Align-Robbe) [-]
 CP, Heck Starrantrieb
CP, Heck Starrantrieb
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| 97cm |
85cm |
1700g ? (1870+Haube) |
BL Align 500L |
Jive60 |
GY401 / 9257 |
6s 2600-3300 |
Fliegen ist OK. Das Gyro (mit dem gleichen Typ hatte ich im 600er Probleme) hält gut. Allerdings erst ab ca. 2200 U/min aufwärts. Ich habe jetzt etwa 2300 U/min. Das Flugverhalten ist näher am 600er als am 450er. Den Wind merkt man aber doch mehr. Die Heckflosse scheint etwas kurz für die Heckrotorblätter, da sie leicht im Gras oder auf einer Oberfläche schleifen !?
Da ich inzwischen Gefallen am Heckrotor Starrantrieb gefunden habe, habe ich den 500er umgebaut. Allerdings habe ich eine Vibration am Heckrotor. Evt. die Blatthalter. Nach Zerlegen und sorgfältigem Zusammenbau ist die Vibration fast komplett weg.
Ich fliege jetzt mit 6s, was vernünftige Drehzahlen erlaubt. Im Kunstflug-Modus um die 2600.
Flugfehler bei schlechter Sicht :-( Eine Menge Zahnräder und Wellen wurden getauscht. Auch einen der Blatthalter und alle Servogetriebe hat es erwischt.
Reparatur und genaues Einstellen. Er geht wieder, ist aber bei extremeren Manövern unruhiger und nicht so präzise, wie die größeren. Da ich einen Hughes500 Rumpf ersteigert habe, wird er jetzt als vorbildähnlicher fliegen und wurde schon teilweise zerlegt.
Raptor 550FBL (ThunderTiger) [5,5]
 (#2) CP, Riemenantrieb
(#2) CP, Riemenantrieb
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| 124,5cm |
115cm |
2280g leer ? |
BL 550-size Kv BL |
Talon 90A SBEC Hot 90A(?) |
BeastX ?? |
6s 5000 6s 5000 (?) |
#1
Hat sich auf einem Treffen ergeben. Der Preis war relativ günstig und das Stabi wollte ich sowieso mal testen. In Zukunft evt. mal für einen Rumpf.#2
Ein gebrauchtes Modell mit 3blatt Kopf.T-Rex 600 ESP (Align-Robbe) [-1]
 CP, Welle
CP, Welle
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| 132cm |
cm |
3500g |
BL Align 600 |
Roxxy 9100-6 |
GY611/ (HC 3A ?) - 9254 |
6s 4000-5000 |
Der Erstflug war ereignislos. Spurlauf paßte, kaum Trimmung, Kreiselempfindlichkeit konnte sehr hoch gedreht werden. Der Heli steht sehr ruhig in der Luft, auch schon bei 1600U/min.
Auch Rundflüge sind einfach. Allerdings habe ich ein Problem mit dem Gyro. Bei leichten Pitchstößen war alles OK und ich konnte die Empfindlichkeit recht hoch drehen (75%). Bei längeren Pitchstößen allerdings fing er dann an zu knattern, d.h. das Heck hat recht schnell aber mit wenig Ausschlag hin und her geschwungen. Ich habe daraufhin die Drehzahl erhöht (2200) und die Empfindlichkeit verringert. Das hat es weitgehend behoben. Allerdings ist mir diese Drehzahl eigentlich zu hoch und auch die Flugzeit sank massiv (12->7min, Durchschnittsstrom 20A->30A). Ich habe den Heckumlenkhebel gegen das Aluteil getauscht. Auf den ersten Blick scheint das Spiel geringer. Nachdem ich immer noch nicht glücklich mit dem Heck war, habe ich ein GP750 montiert, mit dem es sich wesentlich besser fliegt. Auf ebay konnte ich günstig ein GY611 ersteigern, das ich jetzt montiert habe. Die Einstellung ist nur vorläufig, das Feeling aber sehr gut. Das Heck ist sehr stabil.
Allerdings scheint mir meine Gaskurve nicht OK, da die Drehzahl einbricht und der Schub bei Pitch eher begrenzt ist.
Ich habe mal größere Heckrotorblätter montiert, um weniger Drehzahl fliegen zu können. Die Wirkung ist selbst bei niedrigerer Drehzahl brachial. Allerdings habe ich wieder ein wenig vom Schwingen vom Anfang. Fürs erste bin ich wieder auf die Originalblättern zurückgegangen. Außerdem habe ich den Align 100 durch einen Roxxy 9100-6 ersetzt und nehme dessen internes BEC und den Governer Modus.
Die Servowege waren bei der ersten Einstellung nicht korrekt. Dadurch hatte ich bei Vollpitch zuwenig zyklische Ausschläge. Das ist jetzt korrigiert und er fliegt gleich deutlich besser.
Beim Üben für die Autorotation hatte der Heli seinen ersten Schaden. Die vorderen Kegelräder des Heckantriebs wurden beschädigt. Die Drehzahl im IdleUp2 habe ich etwas verringert, um mehr Flugzeit zu haben. Der nächste Schaden kostete ein Servogetriebe. Der folgende Schaden war etwas teurer: Rotorblätter und wieder der vordere Heckabtrieb.
Da die Heckanlenkung früher schon etwas hakte hat er jetzt eine CfK Rohr Anlenkung ohne Führung bekommen. Das geht soweit, nur das Nick scheint neuerdings etwas Roll mitzusteuern.
Jetzt für Nachtflug. Zwei Servogetriebe und die Hauptrotorwelle mit Lagern habe ich getauscht. Jetzt geht wieder alles gut.
Evt. durch die Kälte oder Vorschädigung wurde der Heckabtrieb beschädigt und hat einige Zähne eingebüßt.
Nach einigen Jahren problemlosen Fluges ist der Motor im Flug abgebrannt. Bei der Notlandung scheint recht wenig passiert zu sein.
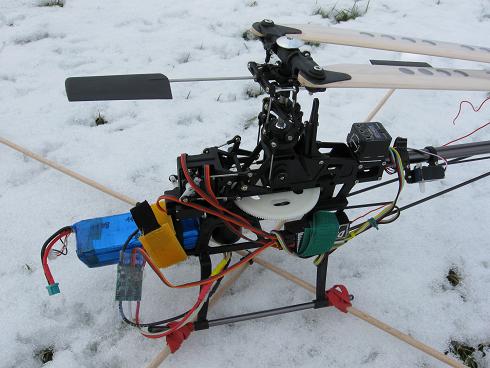
T-Rex 700 E (Align-Robbe) [6,5]
 CP, FBL
CP, FBL
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
FBL |
Akku |
| 158,2cm |
134,3cm |
5100g |
BL Align 700M BL Align 700MX |
Castle ICE 120 HV V2 Castle ICE 120 HV V2 |
Microbeast(1.x) - Savöx(Heck)
GraupnerDES(TS) - HV System - Keto BEC wahrscheinlich MB, Servos Align 610/650 - Keto BEC |
12s5000 |
#1
TREX700E NachtflugUnd nochmal größer. Der leicht gebrauchte Heli war verhältnismäßig günstig. Einiges war nicht korrekt gebaut und eingestellt. Mein erster (erfolgreicher) Flug mit einem flybarless System. Das Flugverhalten ist etwas ungewohnt. Das Microbeast ist recht einfach einzustellen, aber es braucht etwas Zeit. Für diese Akkus mußte ich meine Ladetechnik anpassen. 12s erfordert schon etwas mehr Leistung, um öfter fliegen zu können.
Da kein BEC enthalten war, habe ich eines aus meinen Vorräten genommen. Das ist ein lineares mit 2 Eingängen (Diodenklemmung) und zwei Ausgängen (parallel) für den Empfänger. Da alles vorgesehen ist, nehme ich einen 2s1800 und einen 2s800 Akku. Nur für den Fall. Die Ströme verteilen sich entsprechend der Kapazität, sodaß die % Anzeige nachher ziemlich gleich ist. Pro Flug (7-8min) sinkt die Anzeige um ca. 10%, d.h. theoretisch 10 Flüge oder 260mAh pro Flug. Bei 3D Manövern dürfte sich das allerdings noch erhöhen.
Ich hatte jetzt meine erste erzwungene Autorotation. Ich wollte bei hoher Drehzahl mit vollem Pitch steigen. Allerdings nur kurz, dann schien der Antrieb weg zu sein. Ich konnte den Autorotationsschalter betätigen und mit einer 180° Kurve zum Platz zurückdrehen. Allerdings hatte ich zuwenig Höhe, sodaß mir nur übrigblieb, den Heli aufrecht zu halten und am Ende noch mal Pitch zu geben. Das Ergebnis war akzeptabel. Das Landegestell war gebrochen und eine Kopfanlenkung verbogen.
Anscheinend sind bei Vollast einige Zähne des Hauptzahnrads rausgebrochen. Das ist wohl nicht so ungewöhnlich beim 700er Modul 1. Ist das Modul 0,7 besser ? Ich habe jetzt ein schrägverzahntes Modul 1 Zahnrad, das besser halten soll. Beim Geräusch habe ich keine Änderung bemerkt, da wohl der Rotor die Hauptquelle ist.
Inzwischen habe ich einige Einstellungen verändert und mich an das Microbeast gewöhnt. Der große Heli zusammen mit dem Stabi erleichtert das Kunstflugtraining doch sehr. Ich kann ihn auf den Rücken legen und habe etwas Zeit zu reagieren, bevor er eigene Wege geht.
Nach Anleitung und einigen Beiträgen im Netz habe ich eine sehr hohe Drehzahl im IdleUp2 (>2000). Das werde ich jetzt mal etwas reduzieren. Leistung sollte er auch dann noch genug haben.
Da die Heckanlenkung etwas hakte (wie auch schon beim 600er), hat er jetzt eine CfK Rohr Anlenkung ohne Führung bekommen. Das macht noch etwas Ärger. Ich habe das schnelle Knattern wie am Anfang beim 600er. Ich habe noch eine Führung für das CfK Rohr angebracht, die aber nicht wirklich etwas geändert hat. Ansonsten habe ich die Empfindlichkeit verringert, was das Fliegen erlaubt hat. Danach habe ich das Heck im Microbeast neu eingestellt und es ging wesentlich besser. Evt. ist es mit der neuen Anlenkung angeschlagen.
Da das ständige Laden der Empfängerakkus lästig wurde, habe ich jetzt umgebaut. Die Hauptversorgung ist ein CC BEC Pro(20A) (6V) mit einer Jeti V-Cable Weiche. Die Reserve kommt vom vorhandenen linearen BEC (5,7V) mit einem 2s1800 Akku. Normalerweise sollte das CC BEC als Versorgung ausreichen und der Akku praktisch nicht entladen werden. Er dient nur als Reserve. Zusätzlich noch ein 1000uF/25V Elko am MB. Insgesamt dürfte das Gewicht nicht mal gestiegen sein.
Bei einem durchschnittlichen Flug (mit Kunstflug) habe ich Spitzen von 4,2A gemessen. Die meiste Zeit deutlich unter 2A. Das ist wenig als ich erwartet habe und durch die BEC Technik doppelt abgedeckt.
Leider hatte er jetzt seinen ersten ernsten Crash. Nach einem Außenlooping war der Schub sehr gering, aber nicht komplett weg (Grund?). Ich konnte ihn noch vom Rückenflug auf Normalflug drehen, dann ging es nur noch abwärts in den Mais. Die Schäden sind dafür recht begrenzt. Die Haube hat ein paar kleinere Risse. Ein Rotorblatt ist aufgerissen, das andere OK, Zahnräder und Wellen scheinen auch OK. Leider ist der Roxxy 9120-12 anscheinend abgeraucht, weil ich nicht sofort den Autorotationsschalter betätigt habe. Das neue BEC hat entweder beim Absturz oder dem folgenden Test, bei dem es recht geblitzt hat, sein Leben ausgehaucht (sonst war es immer am Roxxy angesteckt, der Antiblitz eingebaut hat !?). Ich verwende jetzt einen Castle ICE 120 HV V2 zusammen mit einem KETO BEC und einem Jeti Antiblitzstecker. Die Teile sind aus Temperaturgründen nach hinten gewandert. Außerdem kann die Haube so montiert bleiben.
Der Grund für den Absturz ist mir ein Rätsel. Die Elektronik war nicht überlastet, wurde vorher kaum warm, ist innerhalb der Spezifikationen oder deutlich drunter und (bis auf das BEC) schon länger in Betrieb. Die Mechanik zeigt auch nachher keine Schäden außer dem Rotorblatt und einer Anlenkung. Das Manöver war nicht besonders kräftezehrend, Kontrolle war noch da und der Akku noch lange nicht leer. Bei Pitchverwechslung wäre ich viel stärker eingeschlagen. Ich ziehe sogar aerodynamische Effekt in Betracht !? Fliegen in einem (selbstverursachten) Abwind ?
Nach einer leicht mißglückten Autorotation (Blätter haben den Boden berührt), hatten Haupt und Heckrotorblätter leichte Kerben, die nicht kritisch sind. Ich habe trotzdem neue montiert. Die Revolution Blätter scheinen etwas lauter zu sein, ansonsten merke ich keinen Unterschied. Eines der DS610 Servos hatte ein beschädigtes Zahnrad.
Beim Test eines älteren Akkus war plötzlich der Antrieb weg. Ich konnte ihn noch halbwegs heil runterbringen, obwohl die Höhe für eine richtige Autorotation zu gering war. Leider ist er dann umgekippt. Eines der Rotorblätter ist beschädigt. Anscheinend ist ein Akkustecker herausgerutscht. Ich habe den Kabeln bisher keine Aufmerksamkeit geschenkt, aber einer der Stecker war wohl zu lose. Das getrennte 2. BEC hat ihn gerettet.
Beim Testflug nach der Reparatur war erst alles OK, dann fing er an sich um die Hochachse zu drehen. Ich habe ihn dann etwas zu schnell abgesetzt und das Landegestell ist gebrochen, sonst war nichts beschädigt. Meine CfK Rohr Heckanlenkung benutzt eine Gewindestange am Ende. Die Verklebung mit Epoxyharz hatte sich gelöst.
 Nach
einem problemlosen Flug (Zeit, Leistung) hat ein Akku (der allerdings
vorher schon etwas dick war) aufgegeben. Am Boden hat er zu zischen
begonnen und ging gerade noch aus der Halterung raus. Eine Zelle war
schon offen, eine weitere platzte etwas später. Kein Brand.
Nach
einem problemlosen Flug (Zeit, Leistung) hat ein Akku (der allerdings
vorher schon etwas dick war) aufgegeben. Am Boden hat er zu zischen
begonnen und ging gerade noch aus der Halterung raus. Eine Zelle war
schon offen, eine weitere platzte etwas später. Kein Brand.Zuletzt hatte ich Probleme mit Heckzuckern, zuletzt auch Pitchzucken im Schwebeflug oder schon beim Abheben. Ich habe verschiedenes getauscht, aber immer nur partielle Erfolge gehabt. Jetzt habe ich 3x 4700uF Elkos parallel zur Empfängerversorgung gehängt. Der erste Testflug damit war problemlos.
Er hat jetzt ein Service erhalten. Einige der Lager wurden getauscht, waren aber noch nicht wirklich schlecht. Da die vorhandenen Servos etwas Spiel entwickelt haben und nicht unbedingt die schnellsten sind, habe ich alle 4 getauscht. Da das alles HV sind, ist auch das NiederspannungsBEC rausgeflogen und der Lipo geht jetzt direkt auf die Weiche. Bisher keine Probleme. Ob er wirklich schneller reagiert, muß ich erst testen. -> Ja er reagiert merkbar schneller.
Unfall: die Servoscheibe des Nickservos hat sich gelöst: begrenzte Schäden, da es niedrig und langsam geschehen ist.
Unfall: unklare Ursache. Nach einer Autorotation mit nur leicht harter Landung wollte ich wieder starten. Daraufhin hat erst das Heck komisch reagiert, dann hat sich der ganze Heli herumgekugelt... Evt. war eine Anlenkung lose geworden. Massive Schäden am Heckrohr. Repariert.
Unfall: beim Nachtfliegen habe ich die Lageerkennung verloren. Der Heli ist eher langsam auf ein Feld gefallen. Die Schäden sind begrenzt: Rotorblätter(beleuchtet), Heckrohr und Antrieb (kaum sichtbar), Landegestell, Gestänge am Kopf. Das Heckservo geht zwar, läßt sich aber von Hand viel schwerer bewegen, dem muß ich noch nachgehen. Wieder flugfertig.
 Für
das Fliegen im Schnee habe ich "Ski" gebaut. Sie sind aber noch etwas
zu kurz hinten. Selbst bei weichem Schnee sinkt der Heli nicht tiefer
als bis zum Akku ein.
Für
das Fliegen im Schnee habe ich "Ski" gebaut. Sie sind aber noch etwas
zu kurz hinten. Selbst bei weichem Schnee sinkt der Heli nicht tiefer
als bis zum Akku ein.In einem Forum habe ich einen leeren 700er gekauft. Nur die Mechanik, keine Rotorblätter. Derzeit dient er als Reserve, falls die #1 mal runterfällt, und ich habe auch schon einige Teile (Haube, Heck) für die #1 verwendet. In weiterer Zukunft evt. mal für einen Rumpfheli. Nach dem Tausch der Servos in #1 wären die schon mal vorhanden. Nachdem ich wegen gebrochener Seitenteile auch das Hauptteil schon in Verwendung habe, führe ich diesen Heli nicht mehr als einzelnes Modell auf. Das sind jetzt nur noch einige Ersatzteile.
Bei einer Landung gab es komische Zucker des Kopfs. Seitdem wartet der Heli auf eine größere Revision.
#2
Als Tauschobjekt hat sich noch ein T-REX 700E V2 bei mir eingefunden. Er ist aufgebaut, aber noch nicht geflogen. Ausstattung nach Combo (kein HV). Dabei sind auch noch ein 3GX und ein Spektrum-Microbeast. Das 3GX evt. mal für einen kleineren Scaleheli. Ein Verkauf würde wohl nicht viel bringen. Das SMB bräuchte laut Anleitung noch einen Satelliten für ein Modell dieser Größe. Inzwischen verkauft.Auch hier kommen natürlich wieder Gedanken an einen Scale-Heli. Bis dahin ist er einfach ein Reserveheli (oder auch der Hauptheli). Evt. nehme ich den guten Motor der #2 für die #1 und die #2 mehr für Nachtflug (neues Heckrohr und Blätter).
Schlepp
Nachdem ich schon Bannerschlepp mit der Fläche gemacht habe, wollte ich es jetzt mal mit dem Heli probieren. Da ich derzeit am liebsten mit dem 700er fliege und der auch die meiste Power hat, habe ich es damit gemacht.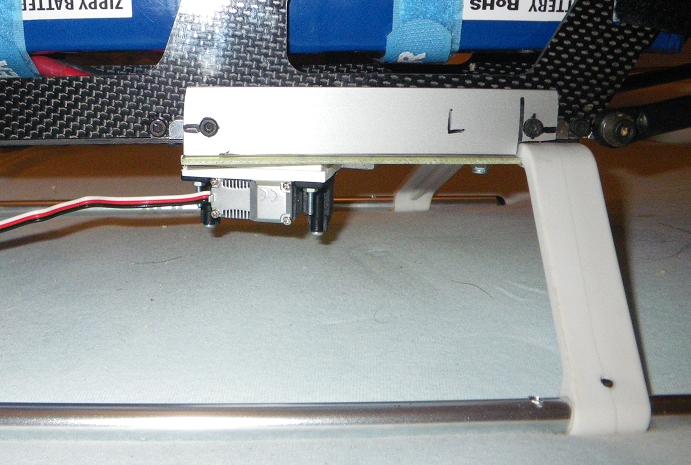 Die
Vorrichtung muß natürlich unter dem Schwerpunkt sitzen. Beim
Heli ist das unter der Rotorwelle. Ich habe einige Zeit über eine
einfach zu montierende und stabile Befestigung nachgedacht und kam dann
zu dieser Lösung.
Die
Vorrichtung muß natürlich unter dem Schwerpunkt sitzen. Beim
Heli ist das unter der Rotorwelle. Ich habe einige Zeit über eine
einfach zu montierende und stabile Befestigung nachgedacht und kam dann
zu dieser Lösung.2 L-förmige Aluwinkel werden mit dem Rahmen verschraubt. Dazu werden schon bestehende Schrauben verwendet. Unter die Winkel wird eine GfK Platte geschraubt, auf der die Abwurfvorrichtung sitzt. Damit brauche ich nur 4 Schrauben und eine Steckverbindung lösen.
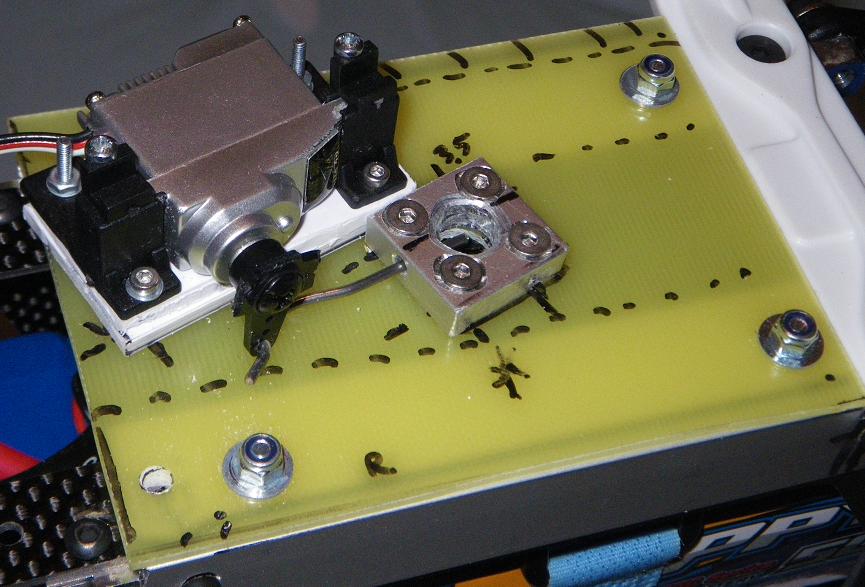 Der
Aufbau ist fast identisch zu einer Flugzeugschleppvorrichtung. Der
Metalldraht, der das Seil hält, wird durch die Aluplatte geschoben
und ist auf beiden Seiten unterstützt. Das Servo zieht den Draht
heraus und löst aus. Damit ist die benötigte Kraft am Servo
recht gering. Der Auslösevorgang sollte schnell vor sich gehen,
damit der Draht nicht verbogen wird.
Der
Aufbau ist fast identisch zu einer Flugzeugschleppvorrichtung. Der
Metalldraht, der das Seil hält, wird durch die Aluplatte geschoben
und ist auf beiden Seiten unterstützt. Das Servo zieht den Draht
heraus und löst aus. Damit ist die benötigte Kraft am Servo
recht gering. Der Auslösevorgang sollte schnell vor sich gehen,
damit der Draht nicht verbogen wird.Das Servo sitzt schräg, weil ich die Grundplatte möglichst klein halten wollte und der Hebelweg durch die Mitte der Platte gehen muß.
Ich möchte noch eine Möglichkeit einbauen, zwei Seile nacheinander zu lösen. Dann könnte man z.B. Wasser aus einem behälter ablassen. Evt. noch eine Drahtführung neben der derzeitigen und ein längerer Servoarm. Oder eine kleine Bohrung in der Führung für eine kleine Öffnung. Die Schlaufe müßte aber sehr klein sein. Evt. ein Drahtseil.
Sonst braucht der Behälter eine eigenes Servo mit einer leicht trennbaren Steckverbindung. Dann wäre auch ein einfaches Schliessen nach Auslösung möglich.
Ich will auch einen Sack zum Bonbonabwurf anfertigen.
 Für den ersten
Test habe ich ein ca. 8m Seil genommen, ein ca.
70x70cm Tuch und ein 0,5kg Gewicht. Das Seil ist ein recht dünnes
Drachenseil, das die Kräfte aushält aber hoffentlich
reißt, wenn es ein Rotor berührt.
Für den ersten
Test habe ich ein ca. 8m Seil genommen, ein ca.
70x70cm Tuch und ein 0,5kg Gewicht. Das Seil ist ein recht dünnes
Drachenseil, das die Kräfte aushält aber hoffentlich
reißt, wenn es ein Rotor berührt.Der Start war kein Problem, allerding hat man den Zug nach unten schon bemerkt. Das Tuch flatterte schön im Fahrtwind. Allerdings wird das Seil bei Geschwindigkeit schon recht hoch gehoben, sodaß ich mir Sorgen um den Heckrotor machte. Abbremsen ist auch nicht so einfach, da man dazu normalerweise ja das Heck runternimmt. In Kurven merkt man deutlich wie das Gewicht den Heli aus der Bahn bringen will. Der Abwurf war einwandfrei.
Nachdem ich mir noch Bilder von Original Flaggenschlepps angeschaut habe (dort war die Seillänge weniger als der Rotordurchmesser und die Flagge im Vergleich winzig), kam ich zu einigen Änderungsideen: das Seil wird verkürzt, das Gewicht evt. noch vergrößert.
Der Flug sollte sehr langsam und in einer Höhe sein. Auch die Kurven langsam und flach.
Mit dem kürzeren Seil war es etwas besser. Das Gewicht sitzt jetzt direkt unten an der Fahne. Allerdings muß ich das entsprechende Fliegen noch trainieren, und ein Vergnügen ist es nicht.
Mit minimalen Anpassungen kann man das Teil auch am Blade550 montieren.
Kunstflug
Ich sammle mal meinen Stand Richtung Kunstflug:| Looping |
OK |
halbwegs rund, auch als
Außenlooping |
| Seitlicher Looping |
mies |
allerdings noch aus dem Stand
oder sehr niedriger Geschwindigkeit |
| Flip | OK |
in beide Richtungen, ich bleibe
halbwegs auf der Stelle |
| Flip aus dem Nasenschweben |
OK |
das Nasenschweben
erfordert noch etwas Aufmerksamkeit |
| Rolle |
OK |
die Pitchsteuerung geht schon
recht gut |
| Rolle im Stand - seitlicher Flip |
OK |
geht schon recht gut |
| Turn |
OK |
jetzt auch mit Pirouetten und
Drehungen um die Längsachse |
| Nasenschweben |
halbwegs |
über längere Zeit,
aber noch nicht wirklich automatisiert, wird besser |
| Start und Landung aus
Nasenschweben |
- |
vermeide ich derzeit, da ich mir
zu unsicher bin. Landung muß ich bei Autorotationen manchmal
machen. |
| Rückwärtsflug |
mies |
Ich übe gerade den Forumskurs,
bin aber noch ganz am Anfang |
| Rückenflug Heck zum Piloten |
teilweise |
statisch auch für
längere Zeit, leichte Bewegungen. Die Automatisierung beginnt
langsam |
| Rückenflug Bug zum Piloten | wenig |
ich muß noch sehr
bewußt steuern |
| Kubanische Acht |
OK |
recht einfach, solange alles
gerade bleibt |
| TicToc |
OK |
Bewegung und Position
müssen noch verfeinert werden. |
| seitliches TicToc |
etwas |
|
| Rainbow |
naja |
noch etwas zaghaft, die erste
Hälfte geht leichter |
| Autorotation |
halbwegs |
ging
meistens gut, aber nicht immer schön, auch aus größerer
Höhe. Das Timing muß ich noch üben. Mit 600er und
700er. Der 700er ist leichter zu autorotieren. In letzter Zeit
paßt etwas nicht, weil ich am Ende kaum noch Reserven habe. Ich hab es auch mit einem 550er gemacht. |
| Rolle+Flip |
OK |
Beim
700er aber nur mit halbem Ausschlag. Auch der 600er geht mit der
Drehzahl zurück. Einfach, aber Höhenverlust. Ich weiß
noch nicht, wie man das bei gleichbleibender Höhe macht. Jetzt
folgen die anderen 3 Richtungskombinationen und dann das gleiche mit
halben Drehungen. |
| Senkrechte Rollen |
wenig |
aus dem Turn heraus geht es,
allerdings brauche ich dann noch eine halbe Pirouette |
| Messerflug Pirouetten |
- |
Bell 47G indoor (Graupner) [7]
FP, koaxial
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| 34cm |
36cm |
210g |
2xSpeed280 | integriert |
integriert | 2s 600-900 |
Was mit der Lama von Hirobo angefangen hat, erreicht schließlich
auch Graupner :-) Das Set incl. Sender ist relativ erschwinglich,
obwohl der Dragonfly5 und der Madercopter(EBAY) noch günstiger
sind. Von Graupner erhoffte ich mir eine problemlose
Ersatzteilversorgung (s.u.). Es ist wirklich alles, was man braucht
dabei,
incl. LiPo Akku mit Ladegerät für 220V/12V und
Ersatzrotorblätter.
Das Fliegen ist völlig unkompliziert. Der Heli ist fast
völlig vormontiert und eingestellt. Lediglich die Paddelstange
muß man noch einclipsen und den Akku einsetzen. Nach leichter
Korrektur des Hecks (auch wenn eigentlich nicht das Heck angesteuert
wird), kann ich schon abheben und im Wohnzimmer herumschweben. Nick und
Roll sind sehr stabil, das Heck braucht regelmäßige
Korrekturen. Den Pitchknüppel mußte ich erstmal umstellen,
damit die Rastung schwächer ist.
Mit dem 800mAh Akku fliege ich etwa 12min. Dann sind allerdings auch
die Motoren recht heiß.
Inzwischen bin ich auch im Freien geflogen. War keine große
Sache, nur die Nick Funktion ist sehr schwach, hier muß ich wohl
am Servoarm weiter aussen einhängen. Nach einem schnelleren
Abstieg habe ich wohl zu stark abgefangen - der Rotor ist in den
Heckausleger eingeschlagen und ich habe ein Verbindungsstück zur
Taumelscheibe im Gras verloren. Jetzt muß ich erstmal das
Ersatzteil bekommen, was ein Problem ist, da keiner der
Händler hier etwas auftreiben kann. Anscheinend will Graupner nur
ganze Helis verkaufen. Inzwischen gibt es wohl einige Teile und ich bin
wieder flugbereit.
Ein Alutuningrotorkopf bringt etwas mehr Abstand zwischen den
Rotorebenen, damit Einschläge vermieden werden.
Einige weitere Änderungen werden im Internet vorgeschlagen, um den
Vorwärtsflug zu verbessern.
Ich habe jetzt von einem Wettbewerb gehört, bei dem mit kleinen
Koaxialhelis nach den Graupner-Cup Regeln geflogen werden soll.
Dafür habe ich mir das Graupner Set gekauft (Landematten und
Pylone).
HM5#8 (Walkera) [-1]
 FP,
koaxial
FP,
koaxial
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| 34cm |
36cm |
223g |
2xSpeed280 | integriert |
integriert | 2s 600-900 |
HM5#6 (Walkera) [7]
 FP,
koaxial, zu verkaufen
FP,
koaxial, zu verkaufen
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| 17cm |
cm |
55g |
2x | integriert |
integriert | 1s 400 |
Blade mcx S300 (EFlite) [7,7]
 FP-Koax, 2G4
FP-Koax, 2G4
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| 18cm ? |
20cm |
28g |
brushed |
int. |
int. |
1s 110mAh |
 Das
andere einen Rumpf, der eigentlich für ein anderes Modell gedacht
ist. Deshalb mußte ich einiges wegschneiden. Außerdem fehlt
noch eine vernünftige Akkuhalterung, da die originale zu weit
hinten ist.
Das
andere einen Rumpf, der eigentlich für ein anderes Modell gedacht
ist. Deshalb mußte ich einiges wegschneiden. Außerdem fehlt
noch eine vernünftige Akkuhalterung, da die originale zu weit
hinten ist.UL-Copter C35 (Carson) [7]
 FP, Doppel Rotor
FP, Doppel Rotor
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| 35cm |
44cm |
g |
2xSpeed280 | integriert |
integriert | 2s 800 |
PicooZ (Silverlit) [7,-1,-1,-1,7]
 FP
FP
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| 13cm |
17cm |
9g |
|
integriert |
- |
1s 45 |
Eigentlich ein Spielzeug, das aber sehr gut funktioniert. Ähnlich wie bei den Koaxialhelis der obere Rotor, stabilisiert der kleinere Hilfsrotor die Fluglage durch Anlenkung des Hautrotors. Steuern kann man nur die Drehzahl und (so halbwegs) die Drehung um die Hochachse. Durch Gewichtstrimm erreicht man eine mehr oder weniger schnelle Vorwärtsbewegung. Eine größere Fläche am Heckrohr (z.B. Klebebandstreifen) beruhigt die Drehung um die Hochachse.
Die Steuerung erfolgt über Infrarot. Drei Kanäle sind am Sender einstellbar. Das Modell ist fix. Wenn man die Verkleidung aufschneidet, kann man auf der Elektronik mit einer Lotbrücke den Kanal ändern. Der Empfang ist selbst in größeren Räumen sehr gut. In Turnhallen sollte man nicht zu weit fliegen. Grelles Licht durch die Fenster kann zu Störungen führen. Im Freien ist die Reichweite natürlich geringer. Allerdings braucht man da sowieso Windstille, sonst verbläst es das Modell sofort.
Der Rumpf aus EPP hilft mit eine sehr hohe Crashresistenz zu erreichen. Zusammenstöße mit der Wand oder Gegenständen sind kein Problem. Ich habe noch kein Teil tauschen müssen. Mit der Zeit leiert die Ladebuchse aus und der Akku wird etwas schwächer. Etwas stärkere Akkus sind als Ersatzteil erhältlich.
Im Internet findet man unzählige Modding Vorschläge, Anleitungen und Pläne. Hauptsächlich neue Rümpfe nach Vorbildern oder der Fantasie.
Unter dem Namen "Little Bee" gibt es das optisch identische Modell auch. Von außen kaum zu unterscheiden. Die PicooZ haben noch eine zusätzliche Elektronik direkt am Akku.
Hier eine weiter Variante, weniger EPP, dafür ein sehr schönes Design: (entsorgt)

Die Akkus aller PicooZ etc. werden schwächer, 2 gehen gar nicht
mehr. Ich habe 3 davon getauscht.
Robocopter (?) [7]
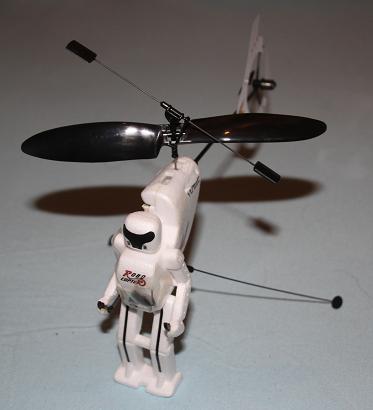 FP, 2G4, zu verkaufen
FP, 2G4, zu verkaufen
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| 13cm |
17cm |
g |
|
integriert |
- |
1s 45 ? |
Micro Lama V3 15g [7]
 FP, koaxial, IR, zu verkaufen
FP, koaxial, IR, zu verkaufen
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| 14cm |
14,5cm |
15g |
3x | integriert |
- | 1s |
Einer der Rotoren geht inzwischen etwas schwerer, daher kann ich ihn kaum noch trimmen. Ich habe jetzt ein CfK Plättchen am hinteren Motor eingeklemmt, sodaß er etwas mehr nach hinten geneigt ist. Damit läuft er wieder leicht.
Copter3 [7]
 FP, koaxial, IR, zu verkaufen
FP, koaxial, IR, zu verkaufen
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| ~14cm |
~14,5cm |
~15g |
3x | integriert |
- | 1s |

Nach einem Absturz ging der Heckrotor nicht mehr. Direkt an den Kabeln konnte ich nichts messen. Das scheint eine Litze aus einzeln isolierten Adern zu sein. Allerdings habe ich dann entdeckt, daß die Cockpitscheibe leicht herausnehmbar ist. Anscheinend hat sich die Verklebung des Akkus dahinter gelöst. Dieser hat dann wohl einen Draht zum Heckrotor abgerissen. Nachdem ich ihn wieder angelötet habe, geht er auf jeden Fall wieder. Allerdings führt jeder Einsatz des Heckrotors(Nick) zu einem Drehen um die Hochachse, was das gezielte Steuern fast unmöglich macht.
FalconIII [7]
 FP, koaxial, IR, zu verkaufen
FP, koaxial, IR, zu verkaufen
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| ~14cm |
~14,5cm |
~15g |
3x | integriert |
- | 1s |
Rümpfe und Rumpfhubschrauber
BO-105 (ECO8-Ikarus) [5-Heli, 2-Rumpf]
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| ~80cm ? |
cm |
~1800g |
FUN500-19 | Smile 40-6-12 Opto |
Robbe 3D-Gyro + MPX digi |
3-4?LiPo |
Jetranger (ECO8-Ikarus) [2]

Hughes 500 Rumpf [2]
Diesen Rumpf in bescheidenem Zustand habe ich auf ebay ersteigert.
Evt. soll er mit dem Heaven Up ausgestattet werden. Oder ich nehme
restliche ECO8 Tuningteile kombiniert mit passenden Teilen vom Heaven.
Leider ist die Kabinenhaube durch die Lagerung (oder schon vorher)
verbogen. Evt. muß ich eine Form bauen um sie korrekt zu
verstärken.Ecureuil (MSComposites) [4-Heli 2-Rumpf]
 CP, 3-Blatt Rotor
CP, 3-Blatt Rotor
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| 53cm |
cm |
g |
BL |
CastleC 25A |
Walkera + FS61digi speed |
3s 850 |
Für die ersten Flugtests ohne Rumpf habe ich ein Wolf450 Landegestell montiert, da mir das Original einerseits schwach vorkommt und andererseits wohl nicht so einfach zu ersetzen ist. Eines der Servos hatte einen Schaden und mußte ersetzt werden. Das ist leider recht nervig, da man an die Sicherungsmuttern kaum herankommt. Der Walkera Gyro ist recht groß und wird noch durch einen kleineren ersetzt. Ich habe eine (damals) günstige FBL Elektronik gekauft, die kaum größer ist (GAUI 365) und ein sichereres Fliegen ermöglichen soll, solange man keinen Kunstflug macht. Allerdings ist sie nicht für 3blatt geeignet, wenn eine virtuelle Taumelscheibenverdrehung nötig ist und ist wohl nicht sehr zuverlässig.
Causemann Rümpfe [2]
Diese Rümpfe habe ich über ebay gekauft. Es sind
durchsichtige Plastikrümpfe, teilweise mit Spanten.- 270er Größe (HB,Trex250) : BK117
- 450er Größe (T-REX): Blackhawk (braucht aber eine
Heckumlenkung)
- 500er Größe (ECO8): Jetranger
Ikarus (?) Rumpf [2]
 Piccolo Größe (270er)
Piccolo Größe (270er)Blade 400 3D - Hughes500 [3]
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| 71,8cm |
65cm |
665g |
BL EFlite |
JAZZ 40 |
GY401 |
3s2200 |
 Hughes500 für 450er Größe, GfK
Hughes500 für 450er Größe, GfK Hughes500 für 450er Größe, GfK, diesmal in
der Military Variante
Hughes500 für 450er Größe, GfK, diesmal in
der Military VarianteDie Military Variante ist etwas weiter vorbereitet und wäre ein Kontrast zu den anderen zivilen Rümpfen. In Sachen Fluglageerkennung ist sie aber benachteiligt.
EC135 (450er) (Align) [3]
 Mit dem 450PRO kam auch ein EC135 (ÖAMTC) Rumpf mit leichten
Schäden am Turbinenauslaß und am HLW. Beleuchtung eingebaut.
Mechanik soll der Solax werden.
Mit dem 450PRO kam auch ein EC135 (ÖAMTC) Rumpf mit leichten
Schäden am Turbinenauslaß und am HLW. Beleuchtung eingebaut.
Mechanik soll der Solax werden.Agusta A109 (450er) (Align) [3]
 (@)
gebraucht, die originalen Räder wurden durch ein normales
Landegestell ersetzt, sind aber noch vorhanden. Außerdem gibt es
eine Lichtanlage. Ich weiß nicht, ob dieser Heli wie der untere
im Lieferzustand ein EZFW hatte.
(@)
gebraucht, die originalen Räder wurden durch ein normales
Landegestell ersetzt, sind aber noch vorhanden. Außerdem gibt es
eine Lichtanlage. Ich weiß nicht, ob dieser Heli wie der untere
im Lieferzustand ein EZFW hatte.Agusta A109 (450er) (Heli Artist) [2]
 450er,
EZFW
450er,
EZFWDer Einbau ist vermutlich schwieriger, da es sehr eng im Rumpf zugeht. Das Einziehfahrwerk soll sehr empfindlich sein.
BO105 (450er) [2]

Eine Heckumlenkung für Riemenantrieb liegt bei.
Hummingbird FP - BK117 (Century) [2]
FP
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| 52cm |
48,5cm |
300-350g |
Speed300 |
|
3s 600-900 |
Hughes500 (500er) (Decent Devil) [3]

Der Rumpf hat einen leichten Schaden unten am Cockpit, ist aber ansonsten neu. Der TREX500 wird jetzt eingebaut. Den Schaden lasse ich erstmal so, wie er ist. Wenn das Fliegen gut geht, wende ich mich der Reparatur zu.
Der Umbau hat begonnen. Durch den Starrantrieb ist das Heck leichter zu demontieren. Problematisch scheint derzeit das Nickservo, das sehr weit seitlich raussteht und zuwenig Platz im Rumpf findet. Im Netz findet man verschiedene Lösungen. Einer hat eine Öffnung für das Servo in den Rumpf geschnitten, was mir nicht gefällt. Andere montieren das Servo anders, damit es weniger weit raussteht. Entweder an anderer Stelle oder mit anderem Winkel, bzw. weiter innen. Mal sehen, was am einfachsten geht. -> Es hat gereicht, die Servoschrauben zu verlängern und das Servo mit Zwischenstücken ca. 1cm weiter hineinzubauen.
Außerdem sind die Kabel vom Motor im Weg. Das Chassis ist sowieso schon sehr hoch. Ich habe die Bodenplatte etwas ausgefräst.
Die hinteren Befestigungen sind fast nicht zu erreichen. Alternativ kann man eine Führung zum Einschieben vorsehen und nur vorne anschrauben. Eine einfache Beleuchtung wäre auch schön.
Ich habe jetzt einen Align 500er 4Blatt Rotorkopf besorgt, womit der Scaleeindruck doch wesentlich verstärkt werden dürfte. Allerdings sollte ich ihn den erstmal ohne Rumpf einfliegen.
V200DQ (Walkera) [2]

Ausgemusterte und verkaufte Modelle:
ShuttleZ (Hirobo) [0]
Verkauft. 30er Größe
Das sollte mein Einstieg in die Verbrennerwelt werden. Allerdings bin
ich
nie soweit gekommen und habe inzwischen den Verbrennern komplett
abgeschworen.
Hyperfly (Kyosho) [0]
 Verkauft.
Verkauft.
Ein kleiner Heli ohne Heckrotor. Flog bei mir nur schwach. Mit heutiger
Technik (Lipo,BL) würde es sicher besser gehen.
Carboon2 (BMI) [0]
Verkauft. FP Klein-Heli. Mit dem Schweben hatte ich so meine Probleme. Rundflüge haben sich im Freien mehr aus Versehen ergeben. Sehr crashresistent ! Die Originalservos sind sehr langsam - ausgetauscht. Die Ersatzteilversorgung ist bei uns etwas problematisch.
Hummingbird2 (Century/ACT) [0]
Verkauft. FP Klein-Heli.War eigentlich als Ersatzteillager für den Carboon2 gedacht, bis ich draufkam, daß er anscheinend nur mit dem Carboon (ohne 2) kompatibel ist. Nie geflogen.
Carboon 400 (BMI) [0]
CCPM, Heck über Welle, verkauft
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| 63cm |
58cm |
475g |
Mega 16/15/3 |
Castle 25A |
GY-401 |
3s 2000 |
Mal wieder ein Spontankauf - fast. Ich hatte schon länger
überlegt ein Modell der 400er Klasse zu kaufen. Dieses hat eine
CCPM Ansteuerung, was mir sehr gefiel. Der Wellenantrieb für den
Heckrotor weniger. Mein Händler hatte wegen einer Fehllieferung
einen Bausatz recht günstig abzugeben und hat mir versprochen,
daß Ersatzteile kein Problem sind(!).
Die komplizierteren Teile sind vormontiert: Rotorkopf, Taumelscheibe
mit Pitchkompensator, Heckantrieb. Die Anleitung ist der absolute
Minimalismus. Einige Bilder sind nur mit Lupe zu sehen. Einige Schritte
(z.B. Servomontage) sind praktisch nicht beschrieben. Die Angaben zur
Einstellung beschränken sich auf die Pitchwerte. Wie stramm der
Heckabtrieb sein darf, wird nicht erwähnt. Ebenso findet man wenig
Angaben zu Motor und Ritzel. Die deutsche Übersetzung ist
teilweise schwer verständlich, da und dort sogar falsch. Es
empfiehlt sich bei entsprechenden Sprachkenntnissen, nach der
englischen Anleitung zu bauen.
Das Chassis besteht aus Thermoplast, die Schrauben fanden gut Halt (bis
auf eine). häufigere Umbauten werden aber problematisch.
Motorritzel ist keines dabei.
Ich gönne ihm eine gute Ausstattung. Xpower BL, Smile 30-6-12,
GY-401, 3s 2000, 4x GWS Naro.
Der Motor bringt leider eine zu hohe Drehzahl und im gedrosselten
Betrieb wird er extrem heiß. Der Mega wird zwar auch warm aber
nicht so sehr. Allerdings ist das ein 6pol Motor, wodurch der Smile mit
der Frequenz/Drehzahl nicht mehr mitkommt, da der Motor mit etwa 30.000
U/min dreht. Der Castle Regler ist etwas heikel bei der
Drehzahleinstellung im Reglermodus. Das Ritzel werde ich wohl noch
etwas größer nehmen um etwas mehr Reserven bei der Drehzahl
zu haben.
Im weiteren habe ich die Ansteuerung der Rotorblätter
geändert. Laut Anleitung und auch bei T-REX u.a. werden die
Blätter von hinten angelenkt, d.h. wenn die Taumelscheibe
hochgeht, sinkt der Pitchwert. Das ist genau verkehrt zu meinen anderen
Helis. Diese Einstellungen wären über die Fernsteuerung
durchaus machbar. Allerdings war ich mir nicht sicher bezüglich
der Wirkung der Paddel. Die Anlenkung der Rotorblätter kann man
auch umdrehen. Dann entspricht alles z.B. dem ECO8.
Toto450S (Totonkatoys) [8]
 CP
CP
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| 71cm |
cm |
g |
|
3s 1800-2200 |
Der Zusammenbau hat sich aus verschiedenen Gründen etwas gezogen. Hauptsächlich liegt das an der unbrauchbaren Originalanleitung. Der einzig nützliche Teil ist eine Explosionszeichnung, die aber leider auf A5 ausgedruckt und dann kopiert wurde, so daß man die Nummerierung fast nicht mehr entziffern kann. Keinerlei Bauphasenbilder oder Baubeschreibung. Eine TREX Anleitung hat mir jetzt weitergeholfen, als ich den genauen Type herausgefunden hatte. Aber auch diese ist zeitweise recht sparsam mit Details.
Bohrungen passen nicht zusammen (Landegestell), Schrauben sind nicht in der angegebenen Dimension zu finden, bzw. sind auf der Zeichnung nicht zu erkennen. Die Nickservoanlenkung muß etwas komisch geführt werden, um nicht mit den anderen Push-Pull zu kollidieren. Laut Anleitung sind die Push-Pull schräg, d.h. die Länge der Servohebel entspricht nicht den Anlenkungshebeln. Es werden aber keine Werte angegeben. Die Akkuplatte ist etwas klein. Die Haube streift in Normallage an den Anlenkungen, durch kürzere Hebel (Rest abgeschnitten) paßt das jetzt. Die Motorschrauben sind sehr schwer zu erreichen und auszurichten. Die Schraube, die unten durch Zahnrad und Hauptrotorwelle geht, wird mit einer Mutter gesichert, der Platz ist aber sehr eng. Bis jetzt gehen die Anlenkungen etwas zäh.
Beim ersten Test hat wohl der Regler (nur ein 25A) nach kurzem abgeschaltet. Außerdem paßt die Position des Ritzels noch nicht. Jetzt sind erstmal die anderen 450er dran. Der TREX-450SE und sein Clon scheinen auch im Aufbau besser zu sein (keine Push-Pull und bessere Materialien - Alu/CfK). Die Mechanik soll in Zukunft in einen Rumpf kommen und wird dafür flugfertig gemacht.
Nachdem ich es nicht geschafft habe, einen Motor so zu montieren, daß das Ritzel gut paßt - der weiche Kunststoff und die ungünstige Montageposition haben mich geärgert - liegt der Heli erstmal auf Eis. Die Servos sind noch drin, ein Aufbau ist derzeit unwahrscheinlich. Besonders da ich ja noch andere bessere Helis habe. Die wenigsten Teile brauche ich als Ersatzteile, also wird er wohl so liegen bleiben. Paddel und Servos sind jetzt auch raus :-)
Ich habe ein Alu 450SE kompatibles Chassis gekauft und werde sehen, wieviele der Teile ich dafür weiterverwenden kann. Wohl nicht soviele. Das Hauptzahnrad weicht ab. Für Heck und Rotorkopf nehme ich lieber Aluteile. Das Landegestell ist etwas weich aber verwendbar. Allerdings kommen die Teile mit einem weiteren Aluchassis wieder ins Spiel für einen der Rümpfe.
Wenige Teile weiterverwendet.
SJM400 (SJM) [0]
 CP, verkauft
CP, verkauft
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| 70cm ? |
cm |
g |
brushless (Align) |
Align |
(GY-401) |
3s2200 |
 Ein 400er Klasse
Heli mit MFS Rotorkopf (ohne Pitchkompensator). Ein
paar Anlenkungen fehlten. Das war besonders lästig, da die
Kugelköpfe ein eher unübliches Maß haben.
Ein 400er Klasse
Heli mit MFS Rotorkopf (ohne Pitchkompensator). Ein
paar Anlenkungen fehlten. Das war besonders lästig, da die
Kugelköpfe ein eher unübliches Maß haben. Das Flugverhalten ist eher nervös, aber beherrschbar. Mich hat hauptsächlich der Kopf fasziniert.
Nachdem er jetzt geflogen ist, wird er wohl nur noch zum Ansehen dienen. Heckservo/gyro habe ich schon wieder ausgebaut. Der Rest folgt bei Bedarf.
Micro Indoor Chinook (Graupner) [0]
 2x FP,
koaxial, 2G4, verkauft
2x FP,
koaxial, 2G4, verkauft
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| ~34cm |
cm |
475g |
4xSpeed280 | integriert |
integriert | 3s 800 |
Kamov KA 58 (Revell) [0]
 FP,
koaxial, 2G4, verkauft
FP,
koaxial, 2G4, verkauft
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| ~34cm |
cm |
g |
2xSpeed280 | integriert |
integriert | 2s 900 |
Blade 550X Pro (E-Flite) [-2]
 CP, Starrantrieb
CP, Starrantrieb
| Rotordurchmesser |
Länge | Gewicht | Motor | Regler |
Gyro |
Akku |
| 124,5cm |
113cm |
3350g |
BL 550-size 1350Kv | Yuki Chiri 160A SBEC | Mini V-Stabi 5.3 |
6s 5000 |
Fürs erste aber einfach nur ein einfaches BEC mit einem getrennten Akku. Beim ersten Versuch mußte ich erstmal die Drehzahl anpassen, die zu niedrig war. Der Regler macht einen Ruck beim Anlaufen, danach scheint er gut zu funktionieren. Der weitere Test war positiv überraschend. Der Heli stand ruhig in der Luft und reagierte gut. Ich hab dann erst einen Rundflug gemacht, dann mit höherer Drehzahl auch ein paar Kunstflugmanöver. Fühlt sich fast wie mein 700er an.
Da ich mir beim Regler (Yuki Chiri 90) nicht so sicher war, bin ich nur kurz geflogen. Tatsächlich war der Regler nach dem Flug sehr heiß. Also habe ich einen stärkeren eingebaut (Foxy125). Evt. auch noch einen kleinen Lüfter, da die Lüftung unter der Haube nur sehr schwach ist. Im Betrieb wird der Regler gut warm, bleibt aber im Rahmen.
Die Haubenfixierung ist etwas lästig und einer der Halter ist schon gebrochen. Ich habe sie nun gegen Teile vom TREX600 getauscht und verwende Tenax Knöpfe, wie bei den größeren Helis. Die Halter sind etwas zu lang, evt. kürze ich sie noch um ca. 5mm.
Das BEC (5A) sollte reichen, ich nutze es aber noch nicht. Ich möchte es über eine Weiche mit dem externen Akku als Reserve verbinden. Allerdings ist das Regler Servokabel recht lang und nicht immens dick. Also werde ich es wohl kürzen müssen.
Der Foxy SBEC 125 Regler funktionierte leider nur im Stellermodus. Im Reglermodus läuft er nur mit maximal ~1000U/min am Kopf. Ich habe statt dessen einen Yuki Chiri 160A SBEC genommen, der besser funktioniert.
Wegen eines schlechten Akkusteckers ist er runtergefallen. Leider/zum Glück nicht sehr hoch, aber Autorotation ging so nicht. Beschädigt wurden hauptsächlich die Blätter und das Landegestell.
Ein passendes habe ich hier nicht gefunden, für T-Rex hatte ich noch was. Da es nicht direkt paßte, habe ich Adapter 3D gedruckt (Thingiverse). Nebenbei stabilisieren sie auch noch das Chassis.

Nach einem Crash ist einiges defekt (Heck, Seitenplatten, Zahnräder, Wellen, Blätter...). Selbst wenn man alle Teile bekommen würde, wäre es erst finanziell zu überlegen. Allerdings bekommt man fast keine kritischen Teile mehr, daher hat eine Reparatur keinen Sinn. Die Teile wurden ausgeschlachtet. Ich hoffe, daß die Elektronik und der Antrieb noch für einen anderen 550er nutzbar sind.
Start der Seite