| |
|
e-mail: bastel.stube@gmx.net - Letzte Änderung: 1.7.2019
Foxbat (ACT) | Mini Foxbat (ACT) | Funjet (Multiplex) | Funjet Ultra (Multiplex) | Shuttle Atlantis (eig.) | Crash2D (Riwa) | Plektrum (fmt) | Plektrum1.5 (fmt) | LEDDisco (BMI) | Flying Disc(?) | Aussee Scheibe (eig.)PicoJet (Multiplex) | Ellipstik (ModelAir-Tech) | Fuzzy (Hepf) | eJet (Schneider CNC) | K10 Delta | Crash3D (Riwa) | Mambo | Twinjet (Multiplex) | SU27XXL (Ikarus) | Micro-Jet (Multiplex) | ThunderBat (Schweighofer) | Impala (Günther Fischer) | Space Shuttle (wb-modellbau)
Kursive Modelle sind nicht mehr in meinem
Besitz. Die Bilder sind im Moment nur
zum Teil von meinen
eigenen
Modellen, ansonsten aus dem Netz oder von fremden Modellen des gleichen Typs wie meine
(gekennzeichnet durch (@) )
Momentaner Status des Modells [n]:
| Status | Bedeutung | Status | Bedeutung | Status | Bedeutung |
| 1 | Plan | 5 | fertig ungeflogen | 0 | verkauft |
| 2 | Bausatz oder Teile | 6 | in Benutzung | -1 | defekt, wird repariert |
| 3 | angefangen | 7 | selten in Gebrauch | -2 | defekt, ausgemustert |
| 4 | fast fertig | 8 | nicht mehr in Gebrauch |
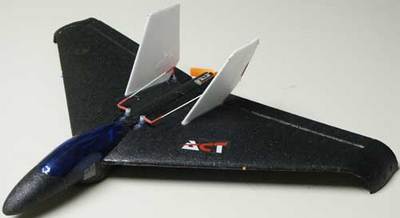
Foxbat (ACT)
[-2,3,2,2]


Motorflugzeug, QHM, Styro, eines ausgemustert, zwei
in Neubau, eines in Reserve
| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 80cm |
80cm |
600-750g |
dm2 |
25-32g/dm2 |
Speed480, Velkom 2020/27, FUN400/28 |
5,5x4,3" |
8x2/3SubC 3s2000 |
Angeblich sollte dieses Modell recht einfach zu fliegen sein, und auch mit einem billigem 400er gut funktionieren. Im Original hat der Foxbat einen Vorflügel, einen sogenannten Canard. Allerdings konnte ich ihn so gerade eben in der Luft halten. Kein Gedanke an einen sauberen Looping. Auch mit 480er ging es nur wenig besser. Dann lag das Modell erstmal eine Weile herum. Bevor ich ihn entsorge, wollte ich ihm noch eine letzte Chance geben. Also habe ich den Canard entfernt und eine Deltaspitze eingebaut. Ab jetzt macht der Foxbat Spaß ! Anscheinend ist der Canard etwas heikel einzustellen.
Im nächsten Schritt bekam er Balsaquerruder und einen Velkom(jetzt ModellMotors) 2020/27 Neodym Motor. Mit 8x1300SC (500AR bringen den Strom nicht mehr) konnte ich etwa 4-5min sehr leistungsfähigen Flug absolvieren.
Original sind die Servos in der Rumpfspitze. Da diese aber das empfindlichste Teil des ganzen Modells ist (etwas anderes ist bisher nicht gebrochen). habe ich die Servos nach hinten verlegt, so kann da fast nichts beschädigt werden, der Schwerpunkt kommt noch hin. Die Farbgebung ist noch nicht die letzte. Ich brauche noch stärkere Kontraste, um die Fluglage besser zu erkennen.
Im weiteren habe ich einen AXI 2808/16 getestet. Der hat mich allerdings nicht überzeugt, außerdem sind Motor und Akku recht heiß geworden. Evt. war die Anpassung des Propellers noch nicht in Ordnung. Bei einem weiteren Versuch war das Modell nicht unter Kontrolle zu bringen (Drehmoment?). Danach habe ich einen Kontronik FUN400/28 eingebaut. Das Flugverhalten ist sehr angenehm, allerdings ist die Flugzeit nicht so gestiegen, wie ich gehofft hatte. Mit nur kurzen Vollgasphasen (der Schub ist gar nicht so einfach zu kontrollieren :-) komme ich auf etwa 5min.
Ein neuer Delta-Foxbat ist schon in Bau, der alte inzwischen nach einem weiteren Absturz entsorgt.
Zum Testen habe ich mir noch einen Twin-Foxbat besorgt, der mit 4
Servos alle Ruder einzeln ansteuern kann. Hoffentlich schaffe ich alle
Tests vor dem ersten Crash :-)
Mini Foxbat (ACT) [2]
 (@)Delta, EPP, QHM
(@)Delta, EPP, QHM| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 45cm |
34cm |
>90g |
dm2 |
g/dm2 |
|
2s 340 |
nach oben
Funjet (Multiplex) [-2,-2,6,8,6,-1,2]
 |
 |
 |
 |
 |
 |
? |
| (#1) |
(#2) |
#3 |
#4 (Wasser) |
#5 (Licht) |
#6 (Vektor) |
#7 |
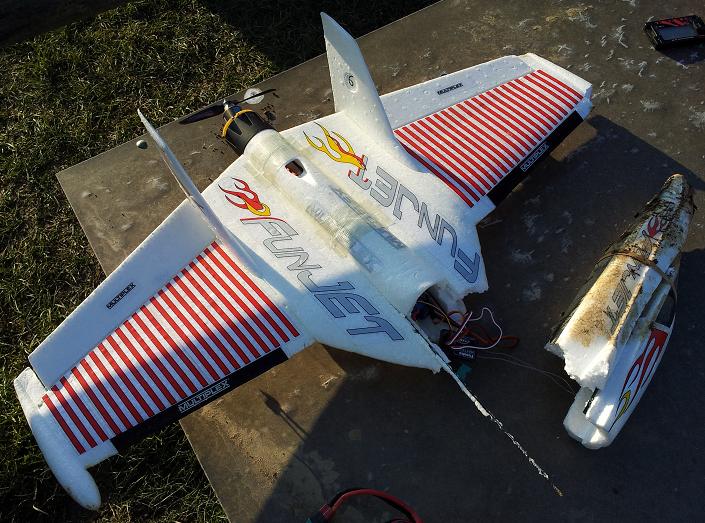
1.Modell, Delta, Elapor, QHM| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 79cm |
75cm |
#3 920g #4 692g #5 #6 |
~15dm2 |
~61g/dm2 ~46g/dm2 |
AXI 2814/10 (600-1000W) Roxxy 2445/08 BL IR (~400W) AXI 2212/9D (300-400W) |
6,5x6,5" 6x4" ? 5,5x4,3" |
LiPo 5s2100 30C LiPo 3s2200 LiPo 3s2200 LiPo 3s2200 |
Der originale Regler Jeti ECO25 schien mir etwas schwach für die von mir angestrebte Leistung. Aber für den Erstflug wollte ich ihn einsetzen. Leider hatte der Vorbesitzer die MPX Hochstromstecker verkehrt herum angelötet und ich nicht darauf geachtet. Also Regler tot (Kulanztausch - danke).
Mit diesem Antrieb (Permax BL480-6D 3s 6,5x6,5", ca. 270W) geht der Funjet schon recht gut.
Ich wollte aber mehr - etwas richtig brutales:
Mit dem AXI 5s Antrieb habe ich mit vollen Akkus eine Eingangsleistung von über 1000W ! Der Start wird damit mehr zum "in die Luft legen" des Modells. Natürlich unbegrenzt senkrecht. Geradeausfliegen geht nur recht kurz, dann muß man schon in die nächste Kurve. Die Laufzeit bei Vollgas ist nur etwa 2:30 - 3:00min. Zur Schonung des Antriebs lege ich immer wieder Segelpausen ein, da der Funjet auch mit dem Gewicht wenig Höhe verliert. Die eingebauten Servos und besonders die dünnen Anlenkungen waren allerdings zu schwach und wurden getauscht. Evt. probiere ich noch einige andere Propeller. Vom Gefühl her ist der 6,5x6,5" etwas zu groß. Ein Teil des Elaporscharniers hat sich gelöst und wurde mit UHUpor geklebt - scheint gut zu halten. Manche schneiden die Flächenenden ab um mehr Geschwindigkeit zu erreichen. Für mich sieht er mit einfach besser aus. Ohne erinnert er mich an den PicoJet, von dem ich keine so hohe Meinung habe. Außerdem dürften sie die Flugstabilität in Grenzbereichen verbessern.
Einige Speedmessungen (GPS unter der Haube, die etwas hoch stand, nicht angestochen):
| Prop |
Strom (volle Akkus, im Stand) |
Speed |
| 6,5x6,5" |
ca. 62A |
204km/h, angestochen 225km/h |
| 6x6" | ca. 45A |
170km/h |
| 6x5,5" |
ca. 35A |
? |
 Nachdem
schon das 2.Mal die Steuerung komplett weg war trotz getauschten
Empfängers(???), schlug er aus größerer Höhe ein.
Nachdem
schon das 2.Mal die Steuerung komplett weg war trotz getauschten
Empfängers(???), schlug er aus größerer Höhe ein.Dieser Schaden wurde repariert.
 Der folgende war aber noch schwerer.
Tief in Bodennähe und abgelenkt konnte ich einen Rucker nicht
aussteuern und das Modell ist mit hoher Geschwindigkeit eingeschlagen.
Die Akkus sind etwas "zerknittert". Dieses Modell wurde außer
Dienst gestellt.
Der folgende war aber noch schwerer.
Tief in Bodennähe und abgelenkt konnte ich einen Rucker nicht
aussteuern und das Modell ist mit hoher Geschwindigkeit eingeschlagen.
Die Akkus sind etwas "zerknittert". Dieses Modell wurde außer
Dienst gestellt.#2
Das 2.Modell mit der alten Technik ist jetzt im Einsatz. Um die Akkus
zu schonen nur mit dem harmlosen 6x5,5".Leider hat sich ein Verzug eingeschlichen, was dazu führt, daß jeder Geschwindigkeitswechsel mit dem QR korrigiert werden muß. Außerdem ist ein QR lose. Vom EPP Scharnier ist nur noch ein kleiner Teil da, und das Ruderhorn ist lose. Das wurde repariert, aber der Verzug ist trotzdem lästig. Nach längerer Ruhezeit habe ich das Modell für ein Combatfliegen reaktiviert, was zu starken Schäden geführt hat und aufgrund der anderen Modelle zur Außerdienststellung.
#3Wegen des Verzugs der #2 habe ich ein neues Modell gekauft, das den obigen #2 Antrieb und stärkere Versteifungen bekommen hat.
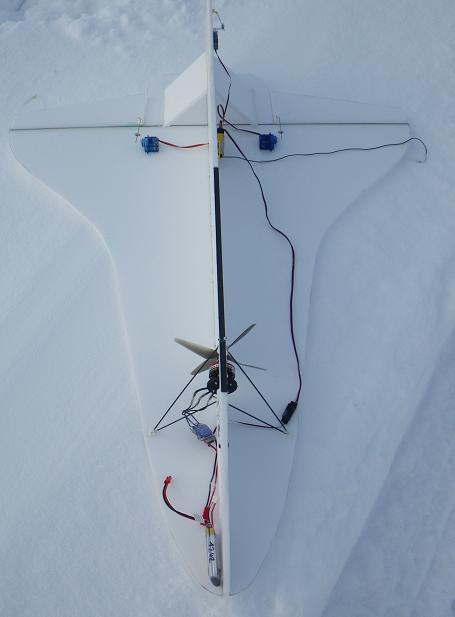
 Um weitere
Verzüge zu vermeiden, hat dieser (mein erster selbst aufgebauter
Funjet) massive Holme bekommen.
Um weitere
Verzüge zu vermeiden, hat dieser (mein erster selbst aufgebauter
Funjet) massive Holme bekommen.Der Original GfK 6mm Rohrholm wurde durch einen 8mm CfK Holm ersetzt, der bis zu den Flächenenden geht. Ein weiterer 6mm CfK Holm weiter hinten ergänzt ihn. Beide wurden mit Harz eingeklebt und mit Glasfaserklebeband abgedeckt. Dadurch ist die Fläche extrem steif. Leider ist damit auch das Gewicht ziemlich hoch, was sich aber im Flug durch den starken Antrieb nicht negativ auswirkt.
 Da mit
schon einmal ein Ruderhorn ausgebrochen ist, klebe ich jetzt 1mm
Epoxyplättchen auf die Gegenseite und verschraube mit M2
Schrauben.
Da mit
schon einmal ein Ruderhorn ausgebrochen ist, klebe ich jetzt 1mm
Epoxyplättchen auf die Gegenseite und verschraube mit M2
Schrauben.
 Hinten habe
ich eine Öffnung geschnitten, um an die Motorkabel hernzukommen.
Nach der Montage wird die Öffnung mit Gewebeklebeband geschlossen.
Hinten habe
ich eine Öffnung geschnitten, um an die Motorkabel hernzukommen.
Nach der Montage wird die Öffnung mit Gewebeklebeband geschlossen.
 Die
Motorkabel kommen am Ende der Motorhalterung seitlich heraus und werden
weiter vorne durch ein Loch ins Innere geführt. Die Kabel mit
Klebeband fixiert.
Die
Motorkabel kommen am Ende der Motorhalterung seitlich heraus und werden
weiter vorne durch ein Loch ins Innere geführt. Die Kabel mit
Klebeband fixiert.
 GPS Messung mit einer alten Haube.
GPS Messung mit einer alten Haube. Nach
dem letzten Flug und einigen Jahren der erste Schaden an diesem Funjet.
Der Motor wollte eigener Wege gehen. Es war ihm wohl zu schnell...
Nach
dem letzten Flug und einigen Jahren der erste Schaden an diesem Funjet.
Der Motor wollte eigener Wege gehen. Es war ihm wohl zu schnell... ... 501km/h !!! Na gut,
anscheinend hatte das GPS eine Macke :-)
... 501km/h !!! Na gut,
anscheinend hatte das GPS eine Macke :-)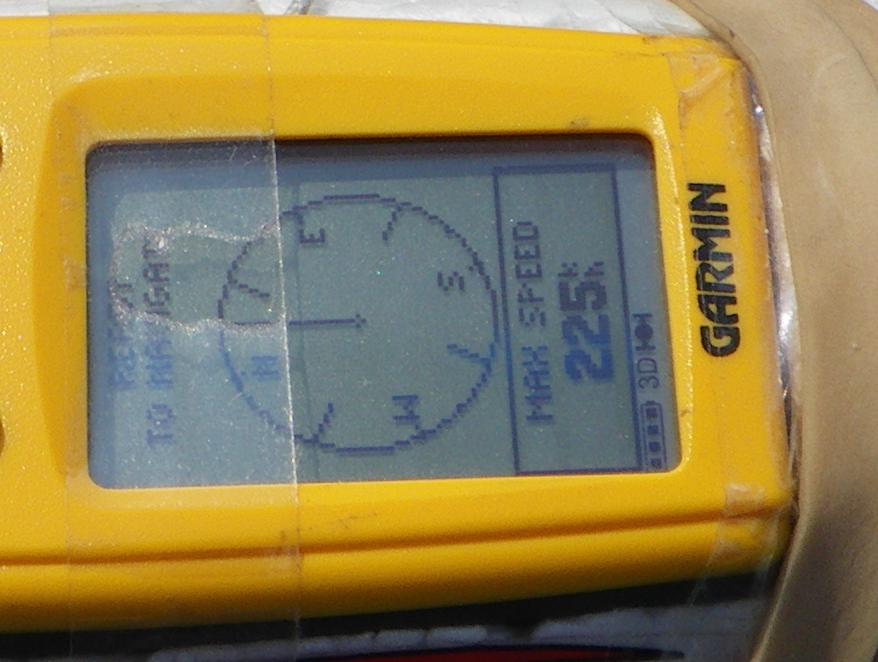 Und hier mal ein realistischer
Wert mit neuen Akkus. 225km/h (mit Anstechen).
Und hier mal ein realistischer
Wert mit neuen Akkus. 225km/h (mit Anstechen).Und mal wieder ein neuer (gebrauchter): die #4
Diesess Modell ist jetzt ein Flugboot.Ein Graupner (~AXI 2814) Motor hinter dem Motorträger befestigt.
CfK Holm. Oberfläche lackiert, Kanten hinten abgeflacht. Der Motor brauchte ein neues Lager, außerdem ist die Welle gebrochen, was als Pusher aber nichts machte.
Ich hab ihn erstmal mit dem Boost18S geflogen. Mit der 4,7x4,7" geht er sehr gut. Standstrom ist allerdings recht hoch, Drehzahl ca.32.000U/min. Mit der 5,7x3" allerdings ist die Drehzahl wohl für meinen Regler zu sehr gestiegen und es gab Aussetzer, ca. 36.000U/min.
Für einen Vektorbetrieb evt. problematisch: ist der kleine Prop zu wenig leistungsfähig oder ist er gut, weil sich damit die Vektorsteuerung leichter tut ?
Das Gewicht mit einem 3s2100 ist erheblich geringer als beim 5s. Ca. 220g weniger.
Der Vorbesitzer hatte recht kleine Ausschläge eingestellt, die ich erstmal vergrößert habe. Allerdings habe ich dabei etwas übertrieben, besonders ohne Expo :-) Zum Glück war Dual-Rate programmiert und ich konnte gut fliegen.
Ich habe verschiedene Propeller mit 3s getestet, aber selbst ein 5x3" zog noch zuviel Strom. Außerdem wurde der SPIN44 Regler immer sehr schnell zu heiß. Also werde ich wohl einen anderen Motor einsetzen. Alternativ wäre noch 2s möglich, aber da habe ich keine passenden Akkus.
Jetzt ein Roxxy 2445/08 (Innenläufer ca. 2500Kv).
Der Antrieb wurde jetzt hochgesetzt, damit der Prop beim Wasserstart aus dem Wasser ist. Trotz beträchtlichem Sturz ist der Start nicht einfach. Man muß voll ziehen und stark werfen. Nach kurzer Zeit hat er genug Geschwindigkeit und das HR kann wieder neutral stehen. Im Flug merkt man ein Nicken, wenn man plötzlich sehr stark Gas gibt. Da das Starten schwierig und das Fliegen auch keine Offenbarung ist, wird dieses Projekt erstmal auf Eis gelegt.
Er war zu günstig... #5
Innenläufer,
die Anlenkungen sind zu lose und wurden geändert. Dieses
Modell hat eine umfangreiche Beleuchtung
bekommen.Flugverhalten klaglos. Der Antrieb reicht nicht ganz für senkrecht, aber immer noch für ordentliche Geschwindigkeit. Maximalstrom etwa 40A, durchschnittlich ca. 30A. Fürs Nachtfliegen ist eher längere Flugzeit interessant. Evt. versuche ich noch einen Propeller mit weniger Steigung und mehr Durchmesser.
Er war zu günstig... #6 gebraucht, nur wenige Flüge

Roxxy Innenläufer, 3s, ca. 500W. Die Servoanlenkungen wurden auf 1,5mm geändert, da er bei hoher Geschwindigkeit schlecht reagierte. Außerdem habe ich hinten einen durchgehenden ca. 1x5mm CfK Stab eingeklebt, wodurch er wesentlich fester geworden ist.
Nach den ersten Tests hat er einen Vektorantrieb erhalten. Und einen AXI 2212/9D.
 Beim
Fliegen mit der Vektorsteuerung bin ich noch am Anfang. Starkes SR
führt zu sehr schnellem Trudeln. Er dreht dann mit 3-6(?)
Umdrehungen pro Sekunde um die Hochachse. Mit Motor und HR kann man das
Sinken stark verlangsamen. Allerdings braucht das Ausleiten etwas
Höhe. Für ein langsames Rotieren muß man sehr
vorsichtig mit den Rudern umgehen.
Beim
Fliegen mit der Vektorsteuerung bin ich noch am Anfang. Starkes SR
führt zu sehr schnellem Trudeln. Er dreht dann mit 3-6(?)
Umdrehungen pro Sekunde um die Hochachse. Mit Motor und HR kann man das
Sinken stark verlangsamen. Allerdings braucht das Ausleiten etwas
Höhe. Für ein langsames Rotieren muß man sehr
vorsichtig mit den Rudern umgehen.Die Mechanik hat ziemliches Spiel.
Die Wicklung des Motors hat sich gelöst und verschoben. Ich habe jetzt mal einen neuen Motor verbaut.
 Nach
einer neuen Figur habe ich zu spät ausgeleitet und es fehlten
einige Meter zum Abfangen. Zum Glück war der Acker recht weich.
Nach
einer neuen Figur habe ich zu spät ausgeleitet und es fehlten
einige Meter zum Abfangen. Zum Glück war der Acker recht weich. Wieder repariert - Crash - wieder repariert - Crash :-)
#7
Noch in der Schachtel. Nach dem Ultra Crash sollten die Komponenten in dieses Modell. Jetzt mit Ultra#2 als Reserve. Evt. baue ich mal einen Ultraleicht Funjet auf.Funjet Ultra (Multiplex) [-2,-1]
 Delta, Elapor, QHM
Delta, Elapor, QHM
| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 78cm |
75cm |
1150g |
dm2 |
g/dm2 |
AXI 2820/8 AXI 2820/8 |
6,5x6,5" 6,5x6,5" |
6s2700 6s2700 |
Bei 6s und 6x6"(Graupner) hatte ich ca. 51A -> ~1100W. Bei 6,5x6,5" waren es 80A im Stand, >1,7kW. Der Start war unkompliziert mit 75-100% Leistung. Geschwindigkeit war sicher hoch (>230km/h). Der Propellersound beeindruckend. Die optische Geschwindigkeit aber nicht soviel höher wie bei der #3.
 Leider
dauerte der Flug nur 1:10. Dann haben die Servos nicht mehr reagiert
und das Modell ist mit vollem Antrieb in den Acker gerauscht. Die
Ursache ist unklar, evt. hat das fehlerhafte BEC den Empfänger
vorgeschädigt. Reparatur aussichtslos.
Leider
dauerte der Flug nur 1:10. Dann haben die Servos nicht mehr reagiert
und das Modell ist mit vollem Antrieb in den Acker gerauscht. Die
Ursache ist unklar, evt. hat das fehlerhafte BEC den Empfänger
vorgeschädigt. Reparatur aussichtslos.#2
 Eigentlich
wollte ich einen "normalen" Funjet mit dem Antrieb ausstatten und die
Flügelenden abschneiden. Allerdings fand ich einen günstigen
gebrauchten Funjet Ultra. Der hatte einen AXI2814/6D mit 3s und ~600W
eingebaut. Flog OK, aber nicht übertrieben. Der Motor ist schon
ausgebaut.
Eigentlich
wollte ich einen "normalen" Funjet mit dem Antrieb ausstatten und die
Flügelenden abschneiden. Allerdings fand ich einen günstigen
gebrauchten Funjet Ultra. Der hatte einen AXI2814/6D mit 3s und ~600W
eingebaut. Flog OK, aber nicht übertrieben. Der Motor ist schon
ausgebaut. Statt dessen der Motor vom 1.Ultra. Damit komme ich auf ca. 1500W. Beim Start will er etwas rollen, ist aber kontrollierbar. Ansonsten unkritisch. Segelt immer noch sehr gut. Die LEDs aber sieht man kaum. Die wurden inzwischen entfernt.
 Beim letzten Flug
benahm er sich plötzlich komisch und dann war auch schon die
Kontrolle weg und er lag im Mais.
Beim letzten Flug
benahm er sich plötzlich komisch und dann war auch schon die
Kontrolle weg und er lag im Mais.Bei näherer Betrachtung war der Schaden recht gering, die Ursache aber eher beunruhigend.
Der Vorbesitzer hatte den Holm anscheinend nur am Ende mit einem recht weichen 2K-Kleber(?) fixiert. Das hat immerhin einige Flüge lang gehalten. Die Vorderkanten sind mit heißem Wasser wieder auszurichten. Die LEDs waren sowieso nicht sehr effektvoll. Ein Servogetriebe ist defekt, der Rest OK. Sogar der Akku war noch an seiner Stelle.
Repariert, fliegt wieder.
Nachdem ein Servo unzuverlässig lief, wurden beide getauscht. Die Flächenvorderkanten sollen noch besser abgerundet werden.
Bei einem zu weiten Landeanflug, ist irgendwas passiert und das Modell runtergefallen. Die Akkus sind gestaucht und die Nase ist verbogen. Der Rest scheint in Ordnung.
nach oben
Shuttle Atlantis (eig.) [6]
 Delta, Depron, QHSM
Delta, Depron, QHSM| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 60cm |
93cm |
230g |
~25dm2 |
>10g/dm2 |
? |
4,7x4,2"(2x) | 2s450-800 |
Ich hatte mal Lust auf eine einfache Eigenkonstruktion. Mein Shuttle weicht doch etwas von dem gekauften ab. Grundlage war eine 3-Seitenansicht aus dem Netz. Die wurde entsprechend vergrößert und auf 6mm Depron übertragen. Ziel war eine Flächenbelastung von etwa 8g/dm2. Dabei wurde die Fläche etwas breiter, und die Ruder sind auch größer als im Original.
 Durch das dicke Material brauche ich nur
wenig
Versteifungen. Vor den QuerHöhenrudern ist ein 6x1,5mm CfK Stab
eingelassen und hinten gibt es Depron Diagonalversteifungen. Das
vertikale Teil sitzt mit Falzen im horizontalen. Die
herausgeschnittenen Teile sind unten wieder eingefügt. Unter der
Fläche gibt es einen 1-2,5cm breiten Depronstreifen, der vorne
höher ist und evt. einen Start vom Boden erlaubt. Daher wurde auch
der Motor so hoch angebracht, daß der Propeller nicht den Boden
berührt. Pichler Nano 8x4,7" und 3s Akku.
Durch das dicke Material brauche ich nur
wenig
Versteifungen. Vor den QuerHöhenrudern ist ein 6x1,5mm CfK Stab
eingelassen und hinten gibt es Depron Diagonalversteifungen. Das
vertikale Teil sitzt mit Falzen im horizontalen. Die
herausgeschnittenen Teile sind unten wieder eingefügt. Unter der
Fläche gibt es einen 1-2,5cm breiten Depronstreifen, der vorne
höher ist und evt. einen Start vom Boden erlaubt. Daher wurde auch
der Motor so hoch angebracht, daß der Propeller nicht den Boden
berührt. Pichler Nano 8x4,7" und 3s Akku.Um den Schwerpunkt zu erreichen werde ich einen relativ großen Akku ganz vorne brauchen.
Der Erstflug war nur begrenzt erfolgreich. Der Motor paßt mit 3s und reicht auch leicht aus. Der Winkel der Schubachse ist auch nicht schlecht. Die Nase geht nur wenig runter bei Vollgas. Das SR reicht aus und ist aber auch nötig.
Das Problem ist der Schwerpunkt. Nach den ersten Test im Zimmer, muß der Schwerpunkt vor dem schwarzen Punkt am zweiten Bild sein. Allerdings erreiche ich das nicht mal mit dem 3s 850mAh(60g) Akku ganz vorne. Vermutlich brauche ich noch mal soviel Gewicht. Mit Motor läßt es sich einigermaßen fliegen, obwohl man auch da die Hecklastigkeit merkt. Ohne Motor nimmt er sofort die Nase hoch und läßt sie da. Mit genug Tiefe und Gas bringt man ihn wieder unter Kontrolle. Ich fürchte, ich brauche einen 1500-2200mAh Akku ganz vorne :-( Damit ist das Gewicht dann für die Halle fast unbrauchbar. Ich werde so weitertesten, damit ich wenigstens den Schwerpunkt bestimmen kann. Vielleich doch mal auch rechnerisch :-)
Nach einem grafischen Verfahren und nach Artikeln sollte der Schwerpunkt etwa beim Knick der Fläche sein. Da meine Fläche breiter ist, eher sogar ein klein wenig dahinter. Mein eingezeichneter CG ist eher weiter vorne. In der Realität ist er ziemlich genau beim berechneten Punkt. Ich hab ihn mit einem schwereren Akku (3s1500 120g) um etwa 4-5cm nach vorne verlegt und siehe da, es fliegt. Segeln einwandfrei, Langsamflug OK, Motor bringt nur leichte Lastigkeitsänderung. So paßt es. Da ich die Fläche nach Gefühl etwas breiter gemacht habe, nehme ich an, daß sich das vorne stärker ausgewirkt hat als hinten und dadurch der Flächenschwerpunkt weiter vorne ist.
Wenn ich in die Halle will, muß eine Alternative her. Der große Akku bringt zwar große Flugzeit, dafür zuviel Gewicht (ca. 310g, ca. 12g/dm2, geplant waren 8g/dm2, mit 45g Akku-> 236g->9,5g/dm2). Das ist selbst draußen nicht berühmt.
- Frontantrieb: nicht schön, aber einfach und recht leicht.
Bodenstart aber nur schwer, außer ich nehme einen Ausleger
für den Motor (wir beim Hydrofoam) oder einen recht kleinen
Propeller. Der Ausleger setzt darauf, daß er im Flug kaum gesehen
wird.
- Mittelantrieb:
der Rumpf ist relativ hoch, da könnte sich ein 6-7" Prop ausgehen,
vermutlich laut. Bei den Abstrebungen hinten, sollte der Motor weit
vorne sein, um Verwirbelungen zu reduzieren. Allerding habe ich nur
Strömung an der Oberseite, was den Start u.U. erschweren kann.
Für den kleinen Prop brauche ich dann einen schnelleren Motor.
- Mittelantrieb mit Mantel (wie Impeller)
- Impeller: ähnlich Mittelantrieb, etwas bessere Wirkung bei
gleichem Durchmesser. Durch den Mantel leichter fest einzubauen.
Dafür schwerer.
 Und
hier die Version mit Mittelantrieb. Der CfK Stab oben für die
Festigkeit. Ebenso die Versteifung für den Motor. Ich wollte einen
2s Akku einsetzen, und der Prop darf maximal 4,7" haben. Für genug
Schub 2 Props für einen 4blatt. Mit dem 4,7x4,2"(2x) reicht der
Schub so ganz knapp zum Hovern. Dabei braucht er aber viel Strom,
für den kleinen (2s450 30C) Akku schon an der Grenze. Mehr als
3min sind bei entsprechendem Gaseinsatz so nicht drin.
Und
hier die Version mit Mittelantrieb. Der CfK Stab oben für die
Festigkeit. Ebenso die Versteifung für den Motor. Ich wollte einen
2s Akku einsetzen, und der Prop darf maximal 4,7" haben. Für genug
Schub 2 Props für einen 4blatt. Mit dem 4,7x4,2"(2x) reicht der
Schub so ganz knapp zum Hovern. Dabei braucht er aber viel Strom,
für den kleinen (2s450 30C) Akku schon an der Grenze. Mehr als
3min sind bei entsprechendem Gaseinsatz so nicht drin.Das Gewicht ist jetzt bei (leer) 200g, mit Akku etwa 230g. Bei der großen Fläche kann man es sehr langsam fliegen. Aber auch schnell geht es gut. Rolle und Looping sind nicht sehr schnell aber einfach. Die Beweglichkeit mit dem SR hoch. Der Antrieb könnte wohl sogar noch etwas weiter nach hinten.
Mit hohem Anstellwinkel kann man stabil fliegend sehr langsam werden. Die Ausformung hinten, wo im Original die Triebwerke sind, erleichtert das Handling, weil es die Ruder schützt. Außerdem kann man so mit Winkel landen, ohne daß der Bodenkontakt etwas kritisches trifft.
 Noch
Details.
Noch
Details.Das Modell läßt sich auch in der Halle gut fliegen. Wenn der Luftraum eng wird, kann ich im Harrier mit großem Anstellwinkel ganz langsam vorwärts schweben und dann wieder Stoff geben.
nach oben
Crash2D (Riwa) [6]
 Delta,
EPP, QHM
Delta,
EPP, QHM| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 42cm |
60cm |
168g |
11,5dm2 |
14,6g/dm2 |
RCSmart EVO2350 |
7x3,5" |
2s 360-500 |
Plektrum (fmt) [6,3]
 Delta, Holz, QHM
Delta, Holz, QHM| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 52cm |
cm |
290g |
dm2 |
g/dm2 |
Jamara Magnum |
6x5" |
3s600 |
Anscheinend war wie beim großen Bruder der Schwerpunkt das Hauptproblem. Beim neuerlichen Erstflug mit dem Schwerpunkt des 1.5 (umgerechnet) waren die vorsichtigen Ausschläge sogar eher zu klein. Mit dem Propeller muß ich mir noch was überlegen. Der Propsaver mit dickem O-Ring schützt gar nicht. Bei fast jeder Landung bricht mir der GWS Prop ab. Daher habe ich einen Klappprop montiert.
#2
 Bei einem Flohmarkt fiel mir noch ein weiteres Modell in
die Hände.
Bei einem Flohmarkt fiel mir noch ein weiteres Modell in
die Hände.Plektrum1.5 (fmt) [6]
 Delta, Holz, QHM
Delta, Holz, QHM| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 78cm |
cm |
g |
dm2 |
g/dm2 |
Nein das ist kein Fehler, das sind zwei (leicht) unterschiedliche Modelle:

nach oben
LEDDisco (BMI) [6]
Scheibe, Holz, QHSM| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 60cm |
60cm |
390g |
28dm2 |
~14g/dm2 |
Roxxy2827-34 |
11x4,7" |
3s800 |
Manövrierfähigkeit ist OK, QR könnte noch mehr sein, Kurven gehen ohne SR fast nicht.
Flying Disc (?) [6]
 Delta, Schaum(?), QHM
Delta, Schaum(?), QHM| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 99cm |
112cm |
2000g |
77dm2 |
26g/dm2 |
AXI 2820/10 |
11x6" |
3s 3000-4000 |
Start mit Griff von oben ist unkritisch. Am Anfang wackelt er noch ein wenig, bis er genug Fahrt hat. Der Schub ist nicht berauschend. Steigflug eher flach und Endgeschwindigkeit begrenzt, aber ausreichend. Mit diesem Antrieb wird man meistens mit 60-80% Leistung fliegen.
Das Flugverhalten ist sehr angenehm. Reaktionen sind ausreichend schnell, aber weich. Strömungsabriß ist kaum zu erreichen. Das Modell kann sehr langsam geflogen werden, auch im Segelflug. Allerdings merkt man den Luftwiderstand. Sowohl im Langsamflug als auch beim Landen ohne Gas. Hier sinkt es schon recht schnell. Man sollte also entweder mit Schleppgas oder steil abwärts landen. Das Aufsetzen ist dann ganz weich.
 Auch
wenn man das Modell ohne SR fliegen kann, so ist es doch gerade im
Langsamflug nicht so gut zu kontrollieren. Daher habe ich ein SR
rausgeschnitten und grob verkastet.
Auch
wenn man das Modell ohne SR fliegen kann, so ist es doch gerade im
Langsamflug nicht so gut zu kontrollieren. Daher habe ich ein SR
rausgeschnitten und grob verkastet.Ich hatte erst Bedenken, ob die Wirkung reicht angesichts der großen Ailerons. Es funktioniert aber sehr gut.
Flying Disc - Nachtflug
Aussee Scheibe (eig.) [-1]
Delta, Depron, QHM| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 62cm |
80cm |
350g leer, ~430g |
49,6dm2 |
8,7g/dm2 |
AXI 2208/26 ? |
8x4" |
3s 800 ? |
Ausgemusterte und verkaufte Modelle:
Fuzzy (Hepf) [0]
 Delta, 400er,
Sperrholz
bespannt, verkauft
Delta, 400er,
Sperrholz
bespannt, verkauft
| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| cm |
cm |
kg |
dm2 |
g/dm2 |
400/6oder 7,2V |
Günni |
7-8x500-1000 |
Der Vorbesitzer hatte wohl Angst das Modell zu fliegen oder war sehr vorsichtig, da es fast wie neu aussah. Mit dem 400Pro und Günther Prop ist der Schub im unteren Geschwindigkeitsbereich eher mäßig. Ich lasse den Knüppel die ganze Zeit auf Vollgas. Für Loopings braucht man genug Geschwindigkeit, Rollen gehen (je nach Rudereinstellung) SEHR schnell. Mit 7x1000KAN bin ich dafür schon auf 13min Flugzeit bei Vollgas gekommen. Das Modell macht sehr viel Spaß. Inzwischen habe ich weitere Akkus gefunden, mit denen das Modell noch besser geht: 8x650KAN, 3x1500LiPo.
Ellipstik (ModelAir-Tech) [0]

 Delta/Wing,
QHM,
400er, verkauft
Delta/Wing,
QHM,
400er, verkauft
| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| cm |
cm |
kg |
dm2 |
g/dm2 |
Speed400 1:2,3 |
~8x6 |
8x500AR |
E-Jet (Schneider CNC) [0]

 Holzmodell
aus Balsa und Sperrholz, Form ähnlich Foxbat Delta,
aber etwas kleiner. Gewicht vergleichbar. QHM. Verkauft
Holzmodell
aus Balsa und Sperrholz, Form ähnlich Foxbat Delta,
aber etwas kleiner. Gewicht vergleichbar. QHM. Verkauft
| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 83,5cm |
cm |
kg |
dm2 |
g/dm2 |
PRO480 |
kl.Günther |
8x |

 Bauphasen
Bauphasen
Das Modell kommt als Holzteilesatz (hauptsächlich Sperrholz, etwas
Balsa) ohne sonstiges Zubehör. Die Teile sind fast komplett und
sehr sauber ausgefräst. sodaß die Arbeit hautsächlich
darin besteht, kurz mit dem Schleifpapier über die Kanten zu
gehen. Leider fehlt eine Nummerierung oder eine Bild der Holzplatten
mit Bezeichnungen, daher muß man hier erstmal sortieren.
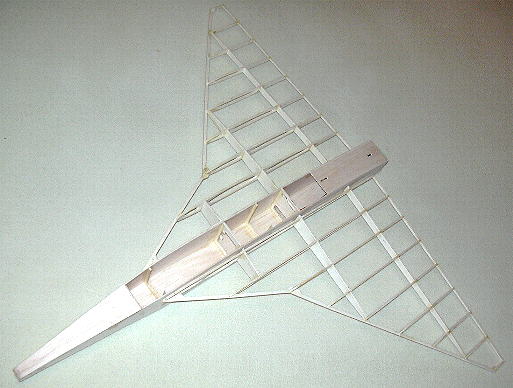 Rohbau
Rohbau
Der Bau geht mit Sekundenkleber sehr schnell und flüssig voran,
obwohl sich die Beschreibung auf das absolut notwendigste konzentriert
und einen in einigen Bereichen alleine läßt.
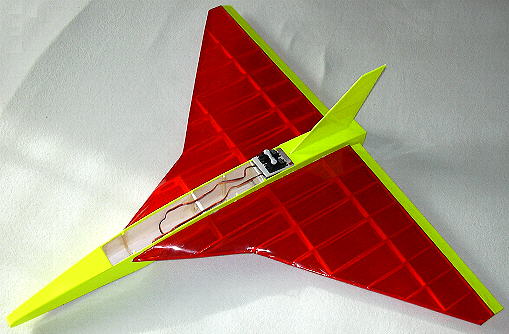
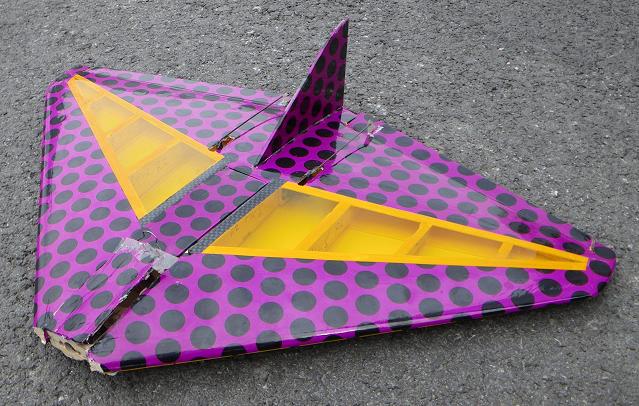
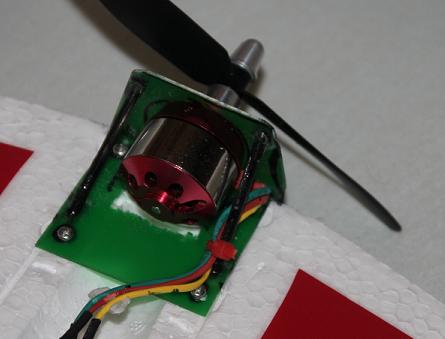
 Das
Modell
fertig bespannt, nur bei der Einbuchtung an der
Tragflächenvorderkante ist es etwas schwieriger. Die
Tragflächen wurden vor dem Verkleben bespannt. Ich habe
bewußt sehr grelle Farben gewählt, um die Fluglageerkennung
zu erleichtern. Auf dem Foto sieht man das für die Servos
vorgesehene Brettchen. An dieser Stelle würde es aber einen
Austausch des Motors verhindern, weiter vorne käme es evt. mit dem
Akku in Konflikt, außerdem würden die Ansteuerungen recht
lang. Daher habe ich die Servos schließlich in die Heckseite
montiert, so ist die Anlenkung sehr direkt und gut geschützt. Als
weitere Option wird angegeben, die Servos in den Tragflächen zu
montieren, aber ohne nähere Angaben.
Das
Modell
fertig bespannt, nur bei der Einbuchtung an der
Tragflächenvorderkante ist es etwas schwieriger. Die
Tragflächen wurden vor dem Verkleben bespannt. Ich habe
bewußt sehr grelle Farben gewählt, um die Fluglageerkennung
zu erleichtern. Auf dem Foto sieht man das für die Servos
vorgesehene Brettchen. An dieser Stelle würde es aber einen
Austausch des Motors verhindern, weiter vorne käme es evt. mit dem
Akku in Konflikt, außerdem würden die Ansteuerungen recht
lang. Daher habe ich die Servos schließlich in die Heckseite
montiert, so ist die Anlenkung sehr direkt und gut geschützt. Als
weitere Option wird angegeben, die Servos in den Tragflächen zu
montieren, aber ohne nähere Angaben.
Das Auswiegen des angegebenen Schwerpunkts war einfach, der Akku
liegt einfach im vorderen Fach. Ich habe erstmal einen Pro480 und
8xKAN1050 probiert. Ob der Antrieb einfach zu schwach war, oder ob ich
die Akkus doch direkt vor dem Flug nochmal laden hätte sollen, ist
unklar. Auf jeden Fall war der Schub viel zu gering. Der Start war OK,
allerdings hat es nicht für eine vernünftige Geschwindigkeit
oder Steigen gereicht. Außerdem war die Fluglage sehr labil (zu
langsam ?). Beim Landen ist er mir dann durchgesackt - zum Glück
kein Schaden. Ein 9xKAN1050 war auch kaum besser. Ein 10x500AR brachte
dann Besserung. Jetzt konnte man richtig fliegen. Allerdings war die
Stabilität um die Längsachse zu gering, Rollen gehen sehr
schnell, beim Looping aber bricht er mir immer seitlich aus. Bei einem
weiteren Manöver brach das Seitenleitwerk ab, woraufhin das Modell
unkontrollierbar abwärts trudelte - wiederum kein Schaden. Auch
durch Vergleich mit dem recht ähnlichen Modell "Fuzzy"
bin ich der Meinung, daß das Seitenleitwerk deutlich zu klein und
zu schwach befestigt ist. Vor dem Motorwechsel werde ich es nochmal mit
warmen Akkus probieren.
nach oben
PicoJet (Multiplex)
[0]
 Funflyer,
QHM,
400/480er, verkauft
Funflyer,
QHM,
400/480er, verkauft
| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| cm |
cm |
kg |
dm2 |
g/dm2 |
PRO480HS |
5,5x4,3" |
8-10x SubC |
Nach einem (von vielen) Abstürzen hatte sein Vorbesitzer genug und ich habe die Reste mitgenommen. Abstürze nicht weil er oder das Modell schlecht geflogen wäre, sondern weil er ihm sehr viel zugemutet hat. Da dieses Modell sehr verbreitet ist, wollte ich es mit meinem Foxbat vergleichen. Derzeit nehme ich 480L und 8x1300 (2/3SC). Der Speed ist doch eher begrenzt, vermutlich aufgrund der dicken Tragflächen, außerdem sind die Rollen trotz großer Ausschläge träge. Mit 10 Zellen geht er etwas rasanter. Diese "Landung" konnte ich erst einen Tag später mit Hilfe eines kleinen Sturms und eines Surfmastes beenden.
K10 Delta [0]

 EPP,
ca. 80cm, verkauft
EPP,
ca. 80cm, verkauft
| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 90cm |
cm |
kg |
dm2 |
g/dm2 |
Speed400/6V |
Günni |
3xKONION |
Crash3D (Riwa) [0]
 Delta,
EPP, QHSM, verkauft
Delta,
EPP, QHSM, verkauft| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| cm |
cm |
~260g |
dm2 |
g/dm2 |
AXI2208/34 |
9x4,7" |
3s 640 |
Angesichts des nahenden Winters und des frühen Sonnenuntergangs, habe ich mit einer Beleuchtung begonnen.
- In der ersten Stufe links und rechts je eine rot/grüne LED, dazu eine weiße Rundum am Heck und eine weiße nach vorne strahlende.
- Beim nächsten Versuch kamen 3 weitere weiße LEDs dazu und bestrahlen jetzt Ober- und Unterseite. Die RundumLED bekam eine Blitzsteuerung.
- Im weiteren kommt noch ein Schaltmodul, um unterschiedliche
Effekte schalten zu können und ein Lauflicht, wahrscheinlich an
der Außenseite.
Neuerdings habe ich fürchterliche Störungen mit dem Modell, die auch nach Wechsel von Empfänger und Regler bleiben !? Nach weiteren Versuchen, die kein Ergebnis brachten (mal geht es, dann wieder nicht), habe ich das Modell verkauft.
Es gibt auch noch einen kleineren Bruder davon: Crash2D
Mambo [-2]
 Motorflugzeug,
QHM, entsorgt
Motorflugzeug,
QHM, entsorgt
| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| cm |
cm |
kg |
dm2 |
g/dm2 |
? |
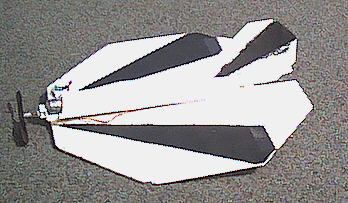
Ein ganz einfaches Scheibenmodell aus Depron. Fliegt auch mit einem
280er. Ich habe einen 400er 1:2,33 mit Klappschraube verwendet. Mit
8x500AR
hatte ich zwar nur knapp 2min Flugzeit, dafür Schub ohne Ende. Ein
Looping
ähnelte
fast einer Rolle um die Querachse. Starke Kontraste bei der Farbgebung
sind nötig. Im Moment benutze ich einen CD-ROM BL mit LiPos. Damit
bekomme ich den Schwerpunkt allerdings kaum weit genug nach vorn. Evt.
brauche ich einen schwereren Akku. Die Leistung ist mehr als genug.
TwinJet (Multiplex) [0]
 Delta, Styro, QHM, verkauft
Delta, Styro, QHM, verkauft
| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 91cm |
80,2cm |
1400g |
25,5dm2 |
54,9g/dm2 |
FUN600-18 |
8x4" ? |
3s4500 |
Die Motorgondeln sind entfernt, außerdem mußte ich hinten etwas kleben. Das Handling ist mir zu lästig, vor allem im Vergleich zum Funjet, daher wurde das Modell wieder verkauft.
SU27XXL (Ikarus) [-2]
 Delta(mehr oder weniger), Depron, QHM, entsorgt
Delta(mehr oder weniger), Depron, QHM, entsorgt| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| cm |
cm |
g |
dm2 |
g/dm2 |
AXI2808/20 |
8x6 |
3s1500 |
Microjet (Multiplex) [-2]
 Delta, Elapor, QHM, entsorgt
Delta, Elapor, QHM, entsorgt| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 66cm |
60cm |
430g ? |
13dm2 |
g/dm2 |
Turnigy 2700 |
5x4" |
3s1500 |
Der erste Motor war ein B20-40-07 von Conrad. Leider hatte ich kein Amperemeter dabei und habe mich daher auf die Berechnungen verlassen. Offensichtlich stimmten die nicht, und nach sehr gutem Flug war der Motor heiß und tot. Der neue Motor ist schwerer und sollte mehr Verlustleistung vertragen. Ich habe jetzt etwa 20A im Stand und nach der Akku Entladung etwa 24A. Die Geschwindigkeit ist gut, das Modell geht längere Zeit senkrecht.
Zum Start stelle ich die Ruder ein wenig hoch, er ist aber unkritisch. Segeln tut der Microjet schlechter als sein großer Bruder Funjet.
 In
der Originalanleitung wird der Motor mit Kabelbindern befestigt, die
rund um das Plastikteil der Motorwanne gehen. Das war mir zur schwach.
Daher habe ich 2 4mm CfK Rohre ins Heck eingelassen. Sie sind nicht
geklebt, da ja keine verschiebenden Kräfte auftreten. Sie sollen
nur den Druck der Kabelbinder auf eine größere Fläche
verteilen. Wie ich gelesen hatte, nimmt er die Nase runter beim Gas
geben. Daher habe ich hinten am Motor noch ein paar mm unterlegt.
In
der Originalanleitung wird der Motor mit Kabelbindern befestigt, die
rund um das Plastikteil der Motorwanne gehen. Das war mir zur schwach.
Daher habe ich 2 4mm CfK Rohre ins Heck eingelassen. Sie sind nicht
geklebt, da ja keine verschiebenden Kräfte auftreten. Sie sollen
nur den Druck der Kabelbinder auf eine größere Fläche
verteilen. Wie ich gelesen hatte, nimmt er die Nase runter beim Gas
geben. Daher habe ich hinten am Motor noch ein paar mm unterlegt.Das Flugverhalten ist im Langsamflug etwas kritischer als beim Funjet. Die Ruderreaktion ist schlechter und die Reaktion auf plötzliches Gas heftiger. Daher sollte man sich die Landung gut einteilen und keine groben Last-minute Korrekturen vornehmen.
Inzwischen auch mit Beleuchtung.
Nach dem letzten Crash wurde er nicht wieder repariert.
ThunderBat (Schweighofer) [0]
 Delta(?), EPP, QHM, verkauft
Delta(?), EPP, QHM, verkauft| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| cm |
cm |
410g |
dm2 |
g/dm2 |
BL |
6x4" (~12A) |
3s1100 |
 Das
Modell ist eigentlich kein richtiges Delta. Wegen der großen
Ähnlichkeit mit dem Funjet wird es aber hier beschrieben. Der
vordere Rumpfteil ist aus Plastik und einfach aufgeschoben. Das
Flugverhalten ist unkritisch und steht einem schwächeren Funjet
kaum nach.
Das
Modell ist eigentlich kein richtiges Delta. Wegen der großen
Ähnlichkeit mit dem Funjet wird es aber hier beschrieben. Der
vordere Rumpfteil ist aus Plastik und einfach aufgeschoben. Das
Flugverhalten ist unkritisch und steht einem schwächeren Funjet
kaum nach.Die Motorhalterung ist im Original aus leichtem Plastik. Da der Propeller wohl einen Schaden hatte, wurde sie dadurch zerstört und ich habe eine neue aus Gfk und CfK gebaut.
Impala (Günther Fischer) [0]
 Delta, Gfk, Holz/Styro, QHM, verkauft
Delta, Gfk, Holz/Styro, QHM, verkauft| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 80cm |
80cm |
>900g |
dm2 |
g/dm2 |
Permax BL480/6D ? |
5,5x4,3" |
4x2200 |
Space Shuttle (wb-modellbau) [0]
 (@)
Delta, Depron, QHM, verkauft
(@)
Delta, Depron, QHM, verkauft| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 60cm |
cm |
130g leer ? |
dm2 |
g/dm2 |
Start der Seite