| |
e-mail: bastel.stube@gmx.net - Letzte Änderung: 26.11.2019
Micro YAK54 | 4-site (E-flite) | Pico Raven (Graupner) | Microblade (Freeair) | Edge 540 (rc-factory.eu) | Umx AS3xtra (e-flite) | Umx P3 Revolution (e-flite)YAK55 | YAK55(dmt) | SU-26 (dmt) | Extra (LG) | Extra (dmt) | Shockflyer (Ikarus) | Manta Lookalike (modellbau-jonny.at) | Sirius Eleven (RT) | Trivia (LG) | Armonia (TechOneHobby) | Clik NG superlite (RC Factory.eu) | Crack Laser (RC Factory.eu) | Champion EP (3DX ?) | IDX248 (Graupner) | GeeBee (modelexpert) | Longimanus (eig.)
Pogo (Telink) | Weihnachtsbaum V2 (eig.)
Ultimate | Quasar (Topmodel) | Pyra (Eigenentwurf) | Tensor 4D (Eflite) | Knuffel (Slowflyer.de) | 3D2 (ebay) | Brick (eig.) | Weihnachtsbaum V1 (eig.) | Extra (Gaksch) | Micro Ultimate (Elektrofly) | Morback F3P (Internet) | Santas Schlitten (eig.) | Yak54 (Gaksch) | Spark Lookalike (modellbau-jonny.at) | Malibu F3P (Pichler) | Malibu R (RK) | Malibu F3P V2 (TechOne) | Micro Shocky | SU-29 (showfly.at) | Indoor Hawk (robbe)
Kursive Modelle sind nicht mehr in meinem Besitz. Die Bilder sind im Moment nur zum Teil von meinen
eigenen
Modellen, ansonsten aus dem Netz oder von fremden Modellen des gleichen Typs wie meine
(gekennzeichnet durch (@) )
Momentaner Status des Modells [n]:
| Status |
Bedeutung |
Status | Bedeutung | Status | Bedeutung |
| 1 |
Plan | 5 |
fertig ungeflogen | 0 |
verkauft |
| 2 |
Bausatz oder Teile | 6 |
in Benutzung | -1 |
defekt, wird repariert |
| 3 |
angefangen | 7 |
selten in Gebrauch | -2 |
defekt, ausgemustert |
| 4 |
fast fertig | 8 |
nicht mehr in Gebrauch | -3 | verschollen |
| -4 | verschenkt |
Micro YAK54 (?) [3]
EPP, QHSM, 3D| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 47cm |
cm |
50g |
dm2 |
g/dm2 |
5g |
2s120 |
4-site (E-flite) [6,6]
 Depron,
QHSM, 3D
Depron,
QHSM, 3D| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 38,6cm |
44,5cm |
35,5g |
5,64dm2 |
6,3g/dm2 |
brushed |
1s120 |
Evt. baue ich den Antrieb auf BL um. Inzwischen gibt es auch einen Nachfolger mit einer angepaßten Elektronik und BL Motor.
#2
 Auf
einem Flugtreffen hat sich noch ein 2. Modell dazugesellt. Ich hab mal
die Plusleitungsmodifikation der UMXtra ausprobiert, aber ohne
nennenswerte Verbesserung.
Auf
einem Flugtreffen hat sich noch ein 2. Modell dazugesellt. Ich hab mal
die Plusleitungsmodifikation der UMXtra ausprobiert, aber ohne
nennenswerte Verbesserung.Pico Raven (Graupner) [8]
 Depron,
QHSM, 3D, zu verkaufen
Depron,
QHSM, 3D, zu verkaufen| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 60cm |
59cm |
87g |
10,11dm2 |
8,6g/dm2 |
Pichler Nano 9g |
7x3" |
2s 250 |
Ich habe hierbei mal soweit wie möglich auf das Gewicht geachtet. D.h. CD-ROM Eigenbaumotor, kleiner Regler ohne Schrumpfschlauch, Empfänger ohne Stecker, alle Servokabel und Stecker abgeschnitten und mit sehr dünner isolierter Litze verbunden. 3,3g Servos, Akku von allem überflüssigem befreit.
Die Flächenbelastung ist trotzdem höher als bei einem leichten größeren Modell. Beim Hovern ist er recht nervös, Rollen und Loops gehen sehr schnell. 3D Fliegen ist mit größeren Modellen angenehmer. Das Modell ist aber aufgrund der geringen Größe trotzdem etwas besonderes. Mit einem Pichler 9g Motor habe ich ihn wieder in Betrieb genommen.
Neuerdings schaffen manche selbst normalgroße Shockies auf ein ähnliches Gewicht zu bekommen.
Microblade (Freeair) [2]
EPP, QHSM, 3D, zu verkaufen| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| cm |
cm |
g |
dm2 |
g/dm2 |
kleiner CD-ROM oder 9-15g |
8x4,7" ? |
2x350 |
Edge 540 (rc-factory.eu) [6]
 EPP, QHSM
EPP, QHSM| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 60cm |
61,5cm |
100g |
dm2 |
g/dm2 |
13g 2200 |
7x3,5" |
2s200 |
Umx AS3xtra (e-flite) [6]
 (@) Depron, QHSM, 3D, Gyros
(@) Depron, QHSM, 3D, Gyros| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 42,6cm |
50,3cm |
36,5g |
4,72dm2 |
7,73g/dm2 |
brushed mit Getriebe |
13x7cm |
1s150 45C(!) |
 Nach
einer Anregung aus dem Internet, habe ich dieses Kabel ergänzt. Da
der Regler nur die Minusleitung schaltet (Bürstenmotor), wird die
Plusleitung (weiß) vom Akku vorn zur Elektronik hinten und dann
wieder nach vorn zum Motor geschleiftt, und das mit einem relativ
dünnen Kabel.
Nach
einer Anregung aus dem Internet, habe ich dieses Kabel ergänzt. Da
der Regler nur die Minusleitung schaltet (Bürstenmotor), wird die
Plusleitung (weiß) vom Akku vorn zur Elektronik hinten und dann
wieder nach vorn zum Motor geschleiftt, und das mit einem relativ
dünnen Kabel.Wenn man den Motor(plus) direkt mit dem Batterieanschluß verbindet, kann man den Spannungsabfall deutlich verringern und mehr Leistung erreichen.
Beim Motor ist wenig Platz, daher muß man da vorsichtig sein.
Umx P3 Revolution (e-flite) [6]
 Depron, QHSM, 3D, Gyros
Depron, QHSM, 3D, Gyros| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 52,3cm |
40cm |
86g |
5,47dm2 ? |
g/dm2 |
BL |
2s200 30C |
Beim ersten Flug hatte ich Probleme mit Aussetzern. Es stellte sich heraus, daß die Pins des Batteriesteckers lose und hineingeschoben waren. Damit hatte ich zwar Kontakt, aber bei Bewegung immer wieder Unterbrechungen, was auch zu einem Absturz führte.
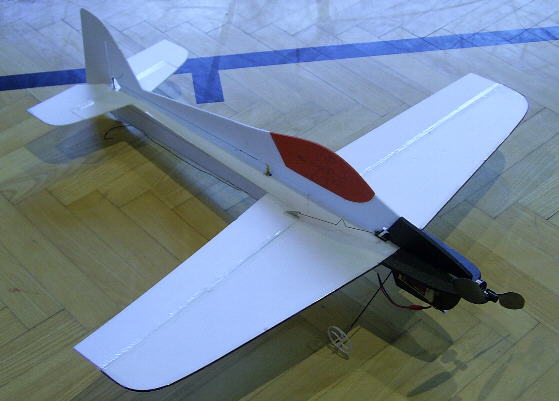
Yak55 (Sturmflug) [-3,6]
 Depron,
3D, Shockflyer, QHSM
Depron,
3D, Shockflyer, QHSM
| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 85cm |
cm |
118g(ohne Akku) ~140g(mit Akku) 120g(ohne Akku) |
dm2 |
g/dm2 |
AXI 2203/46 AXI 2203/46 |
8x4,7" |
2s350-450 |
Dieses Modell ersetzt die YAK54. Es ist besonders für 3D gebaut worden, d.h. starke Ausschläge und starker Antrieb, möglichst niedriges Gewicht. Bei den Anlenkungen war ich am zögern. Seile sind leichter, aber unpraktisch, CfK dafür schwerer. Ich habe jetzt sehr dünne(1mm) CfK Stäbe genommen, die sich am Gitterwerk abstützen. Evt. würde hier auch 0,8mm reichen. Die QR werden über Ikarus Beschläge angelenkt. Das QR Servo ist ein 9g Digitalservo um möglichst schnelle Rollen fliegen zu können. Leider sind die HR/SR Servos zu weit hinten, sodaß der Akku weit nach vorn in den Bug muß. Inzwischen habe ich ihn oben knapp vor dem QR Servo.
 Das
Gitterwerk besteht aus 1mm CfK. Das HR hat auch eine CfK
Verstärkung. Die Flächen haben an der Vorderkante 1x3mm und
an der Hinterkante 0,8x3mm CfK.
Das
Gitterwerk besteht aus 1mm CfK. Das HR hat auch eine CfK
Verstärkung. Die Flächen haben an der Vorderkante 1x3mm und
an der Hinterkante 0,8x3mm CfK.Als Kleber habe ich UHU Por und Belizell verwendet. Bemalung mit Edding. Die Unterseite hat auch schmale schwarze Streifen, da ich oft draußen fliege und bei Schnee und Hochnebel das Modell sonst zu einem "Stealth"modell wird.
Die Reaktion auf QR ist gut, könnte aber noch stärker sein. Für ein weiteres Modell könnte ich mir mehr QR Fläche vorstellen (siehe SU29). Das Flugverhalten ist sehr angenehm. Die Manöver kommen sehr schnell. Das Gewicht erlaubt auch sehr enges, langsames und kontrolliertes Manövrieren.
Beim Gewicht hätte man noch etwas sparen können: Seilanlenkung, leichtes QR Servo, weniger Verstärkungen, Verkabelung, Fahrwerk. Die Kabel, besonders vom Regler werde ich mir wohl nochmal vornehmen.
Die heftigen Manöver fordern ihren Tribut. Auch ohne nennenswerte Abstürze bilden sich Risse im Rumpf.
Nach zwei Crashes hat sich der Bug gelöst. Ich habe 3 beschädigte Bereiche gegen neues Depron getauscht und alles wieder geklebt.
 Leider gab es ein unerfreuliches Ereignis. Nachdem ich der Yak etwas
zuviel Freiraum ließ, kam es zu einer Annäherung an ein Mitglied der
Flora. Das führte zu einer innigen Umarmung und einer wahrscheinlich
längeren Verbindung. Meine Versuche die Verbindung zu torpedieren
scheiterten leider an der Höhe der Begegnung.
Leider gab es ein unerfreuliches Ereignis. Nachdem ich der Yak etwas
zuviel Freiraum ließ, kam es zu einer Annäherung an ein Mitglied der
Flora. Das führte zu einer innigen Umarmung und einer wahrscheinlich
längeren Verbindung. Meine Versuche die Verbindung zu torpedieren
scheiterten leider an der Höhe der Begegnung. Notgedrungen habe ich vorerst meine Versuche die Beziehung zu beenden eingestellt. Ich hoffe jetzt, daß ein stürmisches Ereignis zur Trennung führt. Ob und in welchem Zustand sie dann zu mir zurückkommt, steht in den Sternen. Der Hüttenwirt hat sie inzwischen gefunden. Ich muß nur mal dorthin kommen.

Da sie sehr gut flog, werde ich meinen zweiten Teilesatz aufbauen. Auch die Komponenten werden bleiben. HR/SR weiter nach vorn und mit 2s betrieben. QR muß nicht digital sein. Die analoge Variante hat fast die gleichen Werte. Andererseits soll es mein Primärmodell werden, also warum nicht.
#2
 Das 2.Modell
Das 2.Modell Der
Aufbau geschah sehr ähnlich der #1. Die QR wurden etwas vergrößert. Der Motor und die Servos
sind die gleichen. Nur die Abstützung der Flächenstreben kam
dazu.Die Ruder brauchen Servoarmverlängerungen.
Der
Aufbau geschah sehr ähnlich der #1. Die QR wurden etwas vergrößert. Der Motor und die Servos
sind die gleichen. Nur die Abstützung der Flächenstreben kam
dazu.Die Ruder brauchen Servoarmverlängerungen. Leider habe ich versuchsweise CfK Rohre für das Fahrwerk genommen, die bei geringen Beschädigungen abknicken. Mit etwas Draht ins Innere geklebt läßt sich das reparieren.
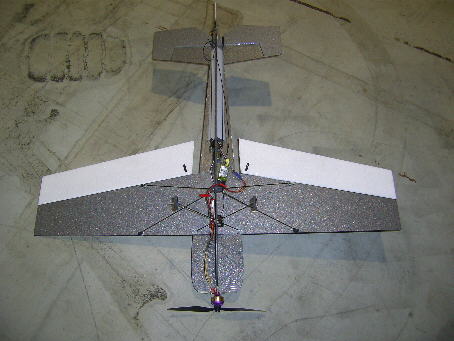
Yak55 (dmt) [6]
 Depron,
3D, Shockflyer, QHSM
Depron,
3D, Shockflyer, QHSM
| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 87cm |
84cm |
156g |
dm2 |
g/dm2 |
Porno Micro King |
8x4,7" |
2s350-450 |
 Dieses Modell ergänzt die andere YAK55. Sie hat 2cm mehr
Spannweite und die meisten (Ruder-)flächen sind deutlich
größer. Ich habe versuchsweise 2 QR Servos verwendet.
Dann reicht aber der 6004 Empfänger nicht mehr aus (außer
mit V-Kabel, was hier durchaus ginge - keine Wölbklappen
nötig, obwohl für spezielle Manöver nicht schlecht).
Dieses Modell ergänzt die andere YAK55. Sie hat 2cm mehr
Spannweite und die meisten (Ruder-)flächen sind deutlich
größer. Ich habe versuchsweise 2 QR Servos verwendet.
Dann reicht aber der 6004 Empfänger nicht mehr aus (außer
mit V-Kabel, was hier durchaus ginge - keine Wölbklappen
nötig, obwohl für spezielle Manöver nicht schlecht).Aufbau wie bei der anderen YAK55. Die QR Anlenkungen können so sehr kurz sein. Die Servokabel könnte man noch gegen dünne ersetzen.
Leider habe ich versuchsweise CfK Rohre für das Fahrwerk genommen, die bei geringen Beschädigungen abknicken. Mit etwas Draht ins Innere geklebt läßt sich das reparieren.
Mit Mischen von HR auf QR ist die Wirkung noch stärker. Der Motor geht sehr gut.
SU-26 (dmt) [3]
Depron, 3D, Shockflyer, QHSM
| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 90cm |
95cm |
170g ??? |
26dm2 |
6,5g/dm2 ? |
AXI 2204/54 |
Mamo VPP 8" |
3s350-450 |
Ähnlicher Aufbau wie die YAK, aber etwas größer. Nur Depronteile.
Ich möchte sie als Test für VPP aufbauen. In einem weiteren Test habe ich angefangen, die Teile auszufräsen. Bei 44g Deprongewicht habe ich 7,7g abgetragen. Der Rumpf wird sowieso versteift, die QR hätten für VPP auch etwas bekommen müssen. Jetzt wohl auch das HR, SR(?). Ich muß mal wiegen, was das CfK wiegt. Ob das ausgefräste Depron noch einen Vorteil bringt mit dem Zusatzgewicht des CfK ?
Extra (LG) [2]
 (@) Depron,
3D, Shockflyer, QHSM
(@) Depron,
3D, Shockflyer, QHSM
| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| cm |
cm |
g |
dm2 |
g/dm2 ? |
8x4,3" |
2s350-450 |
Nur ausgefräste Depronteile (~32g). Soll evt. einen VPP Antrieb bekommen.
Extra (dmt) [2]
Depron, 3D, Shockflyer, QHSM
| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 86cm |
92cm |
ab 140g |
dm2 |
g/dm2 ? |
8x4,3" |
2s350-450 |
Nur ausgefräste Depronteile, nur Depron ~50,6g
Shockflyer (Ikarus)
[-2,-2,6,6,-2]
 erstes
Modell: Edge540
erstes
Modell: Edge540 zweites Modell (Superstar #1): 3DFunflyer(Indoor),
QHSM
zweites Modell (Superstar #1): 3DFunflyer(Indoor),
QHSM
| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 80cm |
75cm |
138g(leer) 164g 163g(leer) 193g |
dm2 |
g/dm2 |
Pichler Nano red AXI2204/54 |
8x4,3" 8/9x3,8" |
2s350-500 3s340 |
Also ich kann die Begeisterung der Leute verstehen. Einfacher Bau und so leicht habe ich noch nie gehovert. Mit 3s340Lipos bin ich auf 10min Flugzeit gekommen ! Notfalls geht er auch bei Wind. Dann sieht man aber schon, wie sich das Heck verdreht, was aber den Flug kaum beeinflußt.
Eine Notwasserung in Salzwasser hat er schon überstanden. Allerdings hat sich durch die hohen Temperaturen im Auto der Flügel stark verdreht. Deswegen habe ich jetzt zwei Streben zum Flügel. Nach einigen Crashes ist jetzt der Nachfolger in Verwendung.
 Und das passiert mit "alten"
Shockflyern...
Und das passiert mit "alten"
Shockflyern...Ich höre immer wieder von Gewichten von 130-160g. Beim nächsten werde ich mal genau auf das Gewicht achten, um das evt. auch zu erreichen. Selbstgewickelter Motor und 2 Zellen, extra leichte 4g Servos, wenig Verstärkungen (siehe).
SuperStar
 #1
#1
Shockflyer Super Star mit AXI 2204/54
Zur Gewichtseinsparung
habe ich den Regler gegen einen leichteren 8A Typ getauscht und setze
einen AXI2204/54
ein. Der Schwerpunkt war damit recht schwierig einzustellen. Das
Flugverhalten hat sich nochmals deutlich verbessert. Lediglich bei Wind
ist es
schwieriger. Nachdem ich jetzt zunehmend auch in Bodennähe
fliege/hovere, ist mein Luftschraubenverbrauch deutlich gestiegen.
Einen neuen Shocky werde ich mir in absehbarer Zeit bauen
müssen (#2 liegt schon zuhause bereit :-). Inzwischen aber hat die
Nummer #1 erstmal eine neue Schnauze bekommen. Mit dem Akku deutlich
weiter hinten funktioniert das Hovern weit besser.
Die #1 wurde inzwischen auch abgewrackt.
 Motoraufnahme, der
zweite Spant ist noch vom größeren Motor
Motoraufnahme, der
zweite Spant ist noch vom größeren Motor
#2
 Ich hatte noch einen Baukasten liegen. Das Modell ist u.a. fürs Hallenpylonfliegen gebaut worden, d.h. nicht
so stark auf das Gewicht achten, dafür sehr fest und keine teuren
Komponenten.
Ich hatte noch einen Baukasten liegen. Das Modell ist u.a. fürs Hallenpylonfliegen gebaut worden, d.h. nicht
so stark auf das Gewicht achten, dafür sehr fest und keine teuren
Komponenten.
Das Gewicht ist gar nicht mal so schlecht (138g ohnE Akku). Leider
habe ich mich beim Zusammenkleben von Fläche und Rumpf etwas
vertan (die Beschreibung ist da nicht sehr klar). Daher ist der Rumpf
vorne etwa 2cm kürzer als vorgesehen. Zusammen mit dem eher
leichten Motor muß der Akku ganz nach vorne um den Schwerpunkt zu
erreichen. Die Anleitung spricht von 40-60mm. Bei 50mm konnte man
fliegen, aber etwas träge. Mit 60mm geht es recht gut und neutral.
Wiedereinmal Schäden beim Hallenfliegen. Eine Fläche hatte ein Loch, das Modell flog aber trotzdem. Repariert.
 Ich
bin teilweise vom Originalplan abgewichen. Die Balsa Versteifungen
fielen weg. Dafür die üblichen (0,8-1mm) CfK Stäbe. Die
Servos sind nicht extra leicht und mit den vorgesehenen Anlenkungen
versehen.
Ich
bin teilweise vom Originalplan abgewichen. Die Balsa Versteifungen
fielen weg. Dafür die üblichen (0,8-1mm) CfK Stäbe. Die
Servos sind nicht extra leicht und mit den vorgesehenen Anlenkungen
versehen.
Beim Pylonrennen gab es einen Crash und der Bugbereich mußte repariert werden.
Und der nächste Crash. Der Rumpf wurde über
größere Bereiche mit Depron aufgedoppelt. Jedes weitere
Rennen bringt weiter Schäden, die grob geflickt werden.
 #3
#3
Ein fertiger Super Star. Billig und
leicht geflickt von einem Flohmarkt.
Der Metallring vorne paßt für einen AXI2204/54, den ich noch
da hatte. Dieser Motor braucht aber einen 3s Akku um brauchbaren Schub
für das Fliegen im Freien zu erzeugen. Besonders, da er nicht so
leicht wie die anderen
Hallenmodelle ist, die ich mit 2s betreibe. Mit 2s in der Halle geht es
aber auch noch.
Das QR Servo bekam eine Verlängerung um die nötigen
Ausschläge zu erhalten.
Einige Schäden beim letzten Hallenfliegen. Wegen der Beleuchtung wurde aber repariert. Erstmal keine neue Schnautze sondern ein grobes Zusammenflicken mit viel PU Kleber. In der Nacht sieht man das eh nicht.
 Diese
Edge bin ich nur einmal geflogen. Ich habe sie gebraucht gekauft. Nicht
sehr gut gebaut und schwer (180g). Mich haben auch nur die Komponenten
interessiert: AXI 2203/46, Jeti Regler und brauchbare Servos. Daher
wird sie abgewrackt.
Diese
Edge bin ich nur einmal geflogen. Ich habe sie gebraucht gekauft. Nicht
sehr gut gebaut und schwer (180g). Mich haben auch nur die Komponenten
interessiert: AXI 2203/46, Jeti Regler und brauchbare Servos. Daher
wird sie abgewrackt.nach oben
Manta Lookalike (modellbau-jonny.at) [2]
Depron, QHSM| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| cm |
cm |
g |
dm2 |
g/dm2 |
Sirius Eleven (RT) [-1]
 Depron, QHSM, F3P
Depron, QHSM, F3P| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 85cm |
93cm |
120g |
dm2 |
g/dm2 |
Hacker A10-15S | 8x3" |
2s200-250 |
 Die
Verstrebungen nach Anleitung finden nicht ganz meine Zustimmung. Das
Heck hätte ich auch so gemacht. Allerdings hätten auch 0,8mm
Stangen gereicht. Die Flächenstreben haben aber im Original keine
Abstützung, wodurch die Fläche sich sehr leicht verwinden
kann. Auch sind die 2 unabhängigen Angriffspunkte für die
Streben ungünstig.
Die
Verstrebungen nach Anleitung finden nicht ganz meine Zustimmung. Das
Heck hätte ich auch so gemacht. Allerdings hätten auch 0,8mm
Stangen gereicht. Die Flächenstreben haben aber im Original keine
Abstützung, wodurch die Fläche sich sehr leicht verwinden
kann. Auch sind die 2 unabhängigen Angriffspunkte für die
Streben ungünstig. Trotz des Aufbaus nach Anleitung ist der Flieger recht schwer. Der Winkel am HR wurde nicht realisiert, da er laut Internet nur für die Optik gut ist.
Die Anleitung zeigt teilweise Bilder eines anderen Modells (Prototyp ?). Die Ausfräsungen zur Führung der senkrechten Rumpfteile könnten zahlreicher sein, um einen krummen Rumpf zu vermeiden. Das Material ist recht empfindlich.
Der Hacker A10-15S aus dem Set wurde sehr heiß und der Regler hat beim 2.Flug recht bald abgestellt. Anscheinend überlastet. Mit dem ersten Roxxy Motor geht der Regler seither klaglos. Damit ist der Schub etwas schwach, aber ausreichend. Ich habe noch weitere aus der 2214 2216 Serie getestet, die alle nicht das wahre waren. Jetzt ein 1820/12, der gut geht
Das Flugverhalten ist soweit OK, aber noch gewöhnungsbedürftig. Die Bremsen sind nicht ausreichend. Ich habe noch einige Teile nach dem Muster aktueller F3P Modelle nachgerüstet (Winglets, Brakelets). Die Seile müssen gut gespannt sein. Inzwischen fliegt er recht gut.
 Zum
Spannen der Seile habe ich aus dünnem GfK kleine Spanner mit 3
Löchern eingefädelt. Das beigefügte Seil reicht nur
für 2 von 3 Anlenkungen. Die Bohrungen an den Ruderanlenkungen
sind zu klein für das Seil und müssen aufgebohrt werden. Die
Knoten an den Spannern müssen noch mit Sekundenkleber gesichert
werden.
Zum
Spannen der Seile habe ich aus dünnem GfK kleine Spanner mit 3
Löchern eingefädelt. Das beigefügte Seil reicht nur
für 2 von 3 Anlenkungen. Die Bohrungen an den Ruderanlenkungen
sind zu klein für das Seil und müssen aufgebohrt werden. Die
Knoten an den Spannern müssen noch mit Sekundenkleber gesichert
werden.Nachdem Gewicht so wichtig ist für F3P, habe ich mal mit der Diät angefangen. Ein Schnurzz 13g/1600kv und ein 2s200/25C Akku. Alles an Schrumpfschlauch und Kabeln entfernt, was nicht unbedingt nötig ist. In Summe fast 20g ! Flugtest steht noch aus.
Das QR Servo wurde auch getauscht. Außerdem die RX Hülle und Klettband, sobald der Schwerpunkt paßt.
Sonst bleibt fast nur noch ein leichterer Propeller. Die Servos haben jetzt alle eher dünne kurze Kabel, solange man nicht am RX anlötet, wird da nicht viel zu holen sein. Höchstens noch einige wenige Gramm.
116,8g derzeit. Allerding ist der Antrieb etwas zu schwach. Ich muß erst testen, was das schwache Glied in der Kette ist.
Mit dem 2200kV Schnurzz geht es besser. Es geht langsam aber beständig aufwärts, auch Hovern am Ende der 2min geht noch. Evt. läßt sich mit Akkus oder Prop noch was rausholen. Hat sich aber alles zu sehr erwärmt und wirklich Reserven hat man auch nicht.
Nochmal zurück zum Schnurzz 13g 1600kv mit 9x3", aber die Leistung war auch so zu gering. Evt. reicht der Antrieb für ein noch leichteres Modell.
Jetzt doch wieder ein Hacker A10-15S. Die ersten Flüge damit waren sehr positiv und das Gewicht kaum höher. Der ursprüngliche Motor oder Regler muß einen Schaden gehabt haben. Derzeit 106g + 14g Akku (200mAh).
Trivia (LG) [6]
 Depron, QHSM, F3P
Depron, QHSM, F3P| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| cm |
cm |
98g |
dm2 |
g/dm2 |
Hacker A10-15s |
8x3" |
2s210 |
In 2014 (70-80g) und 2015 ist das Modell noch aktuell, wird aber oft komplett ausgefräßt und mit Folie bespannt verwendet. Der neueste Trend 2015 sind bespannte CfK Stab Modelle mit unter 40g ! Diese sind aber nicht erschwinglich oder zu schwer selber zu bauen.
Hier habe ich mal alles angewendet, was mit vertretbarem Aufwand dem Gewichtssparen dient. Das Depron war ja schon ausgefräßt. Der Motor könnte etwas leichter sein, aber ich habe nichts passendes da. Ein CfK Prop wäre vielleicht effizienter, aber nur ~1g leichter.
- CfK so dünn wie möglich, aber keine Rohre. Meist 0,8mm, einiges, das nur auf Zug belastet wird auch mit 0,5mm, ebenso wie die Ruderverstärkungen.
- Die QR Anlenkung mit Kugelköpfen vom TREX-250. Ist zwar nicht das leichteste, funktioniert aber gut.
- Anlenkungen im Heck mit sehr dünner Kevlarleine
- Empfänger ohne Hülle und Kabel direkt angelötet, ebenso beim YGE7S (0,7g) ohne BEC.
- Alles mit D47/FS31 Servos, die 2s direkt vertragen, Servokabel abgeschnitten
- Kleber sparsam angewendet, aber an höher belasteten Stellen (Flächenstrebenbasispunkt und Fahrwerk) doch etwas mehr Belizell, da das ausgefräßte Depron einfach sehr empfindlich ist.
- UHU-Por Scharniere
- kaum Farbe
Auch die Abwärtspassagen sind mir noch zu schnell, trotz ~16g weniger als bei Armonia. Ich habe ein paar Bremsen ergänzt im Stil der Armonia. Außerdem ist der Akku mit langen Kabeln weit nach hinten gewandert. Inzwischen fliegt es sehr gut. Richtig eingestellt fliegt es fast in jeder Lage gerade weiter und ist sehr angenehm durch das Programm zu führen. Der Transport ist immer etwas heikel, da das Modell sehr empfindlich ist. Leider hat der YGE7S eine Macke, durch die er hin und wieder beim Anstecken blockiert und heiß wird. Nach Abstecken geht er häufig wieder. Leider hat der Hersteller auch keine Lösung dafür.
Nach Kontakt mit einem anderen Modell ist der untere Hilfsflügel beschädigt.
Armonia (TechOneHobby) [-1]
 Depron, QHSM, F3P
Depron, QHSM, F3P| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 84cm |
95cm |
114g |
dm2 |
g/dm2 |
Hacker A10-15S |
8x3" |
2s210 |
Davon abgesehen ist der Bau gut beschrieben und problemlos. Das Flugverhalten ist sehr angenehm. Langsam abwärts und sehr stabil in der Luft liegend. Bei der Vierpunktrolle braucht man nicht korrigieren, auch bei anderen Manövern bleibt es sehr angenehm in der Spur.
 Inzwischen sieht es nicht mehr so schön aus, fliegt aber noch.
Inzwischen sieht es nicht mehr so schön aus, fliegt aber noch.Clik NG superlite (RC Factory.eu) [2]
 F3P Trainer, EPP, QHSM
F3P Trainer, EPP, QHSM
| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 84cm |
94cm |
120g |
m2 |
g/dm2 |
40-60W |
8x3" 9x3" |
2s200 |
Crack Laser (RC Factory.eu) [-1]
 EPP, QHSM
EPP, QHSM
| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 8cm |
82,5cm |
188g |
m2 |
g/dm2 |
Porno King |
8x4,3" |
2s350 |
Champion EP (3DX ?) [2]
 (@) 3D-Funflyer, Depron beschichtet, QHSM, zu verkaufen
(@) 3D-Funflyer, Depron beschichtet, QHSM, zu verkaufen
| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 88cm |
cm |
330g |
dm2 |
g/dm2 |
nach oben
IDX248 (Graupner) [2]
 Depron,
QHSM/VPP, 3D
Depron,
QHSM/VPP, 3D| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 100cm |
cm |
230-270g |
dm2 |
g/dm2 |
g |
Longimanus (eig.) [6]
 Depron,
QHSM
Depron,
QHSM| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 80cm |
87cm |
92g(ohne Akku) 104g(leichter Akku) 114g(schwerer Akku) |
8,8+6(Rumpf)dm2 |
g/dm2 |
Nano 9g |
6x3" |
2s200-350 |
 Die Flächen haben aber relativ geringen
Flächeninhalt. Dafür ist der Rumpf breit. Da das Modell nicht
für starken Kunstflug gedacht ist, relativ wenige
Verstärkungen. Das kommt dem Gewicht zu gute. Was wiederum einen
leichteren Motor und Akku erlaubt. Die QR sind weiter außen und
könnten nur schlecht von einem zentralen Servo angesteuert werden.
Daher zwei MiniServos mit sehr kurzen Anlenkungen.
Die Flächen haben aber relativ geringen
Flächeninhalt. Dafür ist der Rumpf breit. Da das Modell nicht
für starken Kunstflug gedacht ist, relativ wenige
Verstärkungen. Das kommt dem Gewicht zu gute. Was wiederum einen
leichteren Motor und Akku erlaubt. Die QR sind weiter außen und
könnten nur schlecht von einem zentralen Servo angesteuert werden.
Daher zwei MiniServos mit sehr kurzen Anlenkungen.Die Verstrebungen wie sonst üblich. Ist vermutlich etwas übertrieben, aber auf der sicheren Seite. Der Motorhalter ist ein kurzes CfK Rohr, in das der Motor saugend reinpaßt. Das Fahrgestell sind nur 2 CfK Stäbe. Wegen des nach unten langen SR kann man da nur schwer kürzen, wenn man auch mal starten will.
Der Schwerpunkt ist an der üblichen Stelle, aber mit dem kleine Akku nur schwer zu erreichen. Der Empfänger könnte noch ein wenig nach vorn.
Rollen gehen gut, HR sehr gut, SR etwas asymmetrisch, es bringt eine Kurvenneigung, Langsamflug geht. Für mehr Vorbildtreue könnte man das HR vermutlich noch verkleinern (auch gut für den Schwerpunkt). Der Schub ist begrenzt. Mit vollem leichtem Akku kann man noch knapp aus dem Hovern raussteigen. Potential zum Gewichtssparen sehe ich als gering an: Kabel und Streben maximal etwa 5g. Dabei sind die Kabel noch am vernünftigsten.
Mit (älteren) 2s250 kann man gut fliegen, aber Looping etc. in der Halle gehen nicht gut. Mit 2s350 hat der Motor trotz des insgesamt höheren Gewichts mehr Power und erlaubt wesentlich besseren Kunstflug.
 Inzwischen hat er auch eine angemessene Bemalung bekommen.
Inzwischen hat er auch eine angemessene Bemalung bekommen.GeeBee (modelexpert) [2]
 Depron,
QHSM, zu verkaufen
Depron,
QHSM, zu verkaufen| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| ~60cm |
cm |
g |
dm2 |
g/dm2 |
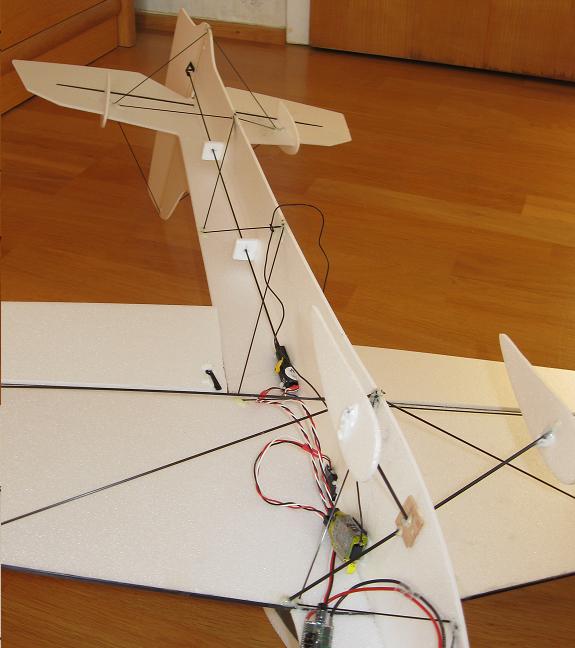
Pogo (Telink) [6]
 Depron,
QHSM
Depron,
QHSM| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 59cm |
70,5cm |
245-300g |
24,5dm2 |
g/dm2 |
Jamara AL-M980 |
10x3,8" |
3x640 |
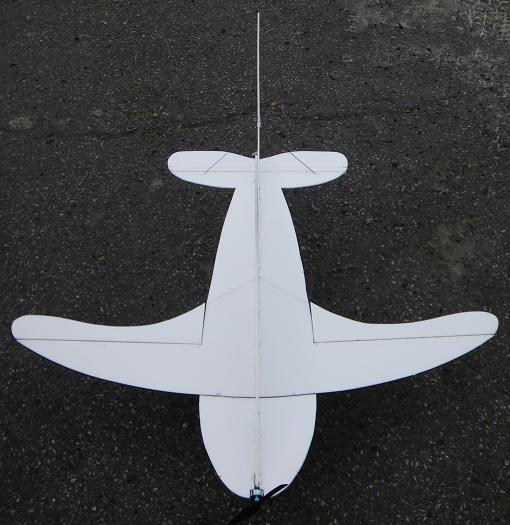
Convair XFY 1, Senkrechtstarter.
Das Flugverhalten ist anders als bei einem gewöhnlichen Shockflyer, aber erträglich. Loopings sehr eng. Kurven nur mit Seitenruder gehen gut. Mein SR hat aber noch zu wenig Ausschlag, die Anlenkung ist ziemlich lästig einzubauen. Mit einen weiteren Servo (entweder V-Kabel oder gemischt) wäre es sehr viel einfacher.
Das Gewicht entspricht der Angabe, wobei die Drahtbügel am Bug (ich habe sie eingebaut) recht schwer sind. Der angegebene Schwerpunkt scheint mir nicht zu passen. Ich bin noch am Testen, aber 1cm wird er sicher weiter nach hinten kommen.
Der angegebene Motor (ca.30g) reicht zum Fliegen und für senkrechtes Steigen, aber ohne Reserven und im maximalen Strombereich. Ich werde einen der 45g Klasse einbauen. Es fehlten Versteifungen. Im Geradeausflug sah man, wie sich die Flächen zu einem V verbogen.
Jetzt habe ich 4 Querstreben zwischen den Flächen oder einen CfK Flachstab in der Hauptfläche ergänzt. Es sollen noch Versteifungen in den Standfüßen/Flächenenden folgen. Auch weil sich die Seitenteile verbiegen und die Ruder blockieren können.
Das Modell fliegt jetzt sehr angenehm, trotz des Gewichts reicht der Antrieb gut aus. Senkrechtstart ist kein Problem, ebenso Langsamflug und schnelle Rollen. Senkrechtlandung ist etwas heikler, aber machbar.
In der Halle sind die Schwebemanöver (Landung) natürlich viel einfacher, da der Wind und der ungleichmäßige Untergrund wegfällt. Selbst für schnelleres Fliegen reicht die Manövrierbarkeit gut aus. Nach einem weiteren Absturz (geringe Schäden) habe ich genug von der Servos und werde sie bei nächster Gelegenheit tauschen.
Weihnachtsbaum Version 2 (eig.)
[6]
 Senkrechtstarter, Depron, QHSM
Senkrechtstarter, Depron, QHSM| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 60cm |
60cm |
190g (oberes Bild) 247g mit Licht etc. |
15-16dm2(?) |
~12g/dm2 |
Nano limited |
9x4,7" |
3s750 |
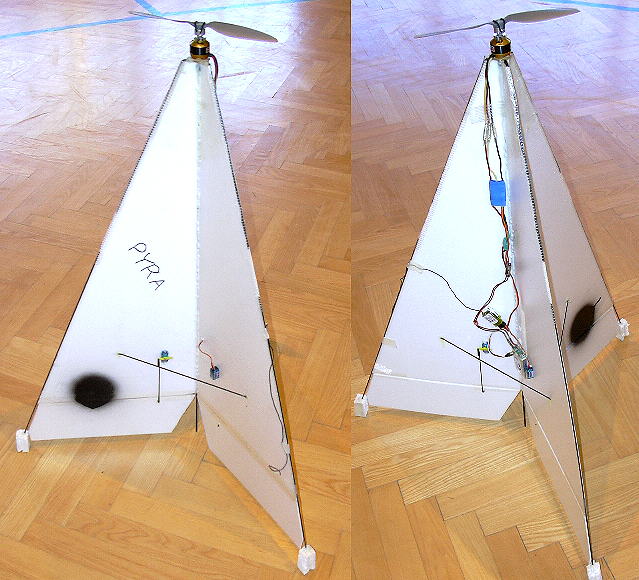
 Für
den Motor eine Rohrhalterung in der Spitze.
Für
den Motor eine Rohrhalterung in der Spitze.  Vier dünne
CfK Stäbe stabiliseren die 4 Seiten.
Vier dünne
CfK Stäbe stabiliseren die 4 Seiten.Die SR sind zusammen angelenkt. Die Lösung des Pogo gefiel mir allerdings nicht. Daher hier eine andere Variante.
 Die Anlenkung ist
aus einem Stück Draht gebogen. Die Anlenkung geschieht auf einer
Seite. Durch eine Öffnung führt ein Ende durch die
Fläche. Bei so leichten Modellen lasse ich die Schrauben der
Servohebel meist weg. Die Kräfte sind gering, andererseits
können sich die Hebel bei Überlastung (Absturz) lösen,
ohne daß etwas bricht.
Die Anlenkung ist
aus einem Stück Draht gebogen. Die Anlenkung geschieht auf einer
Seite. Durch eine Öffnung führt ein Ende durch die
Fläche. Bei so leichten Modellen lasse ich die Schrauben der
Servohebel meist weg. Die Kräfte sind gering, andererseits
können sich die Hebel bei Überlastung (Absturz) lösen,
ohne daß etwas bricht. Am Ruder ist eine Verschraubung, durch die die Länge gut
eingestellt werden kann.
Am Ruder ist eine Verschraubung, durch die die Länge gut
eingestellt werden kann. Hier nochmal von der Seite zu sehen.
Hier nochmal von der Seite zu sehen. Nach
der Vorlage stand das Modell erst direkt auf den QR. Da das aber nicht
praktikabel ist, habe ich eine Verstärkung eingeklebt und die QR
abgeschnitten.
Nach
der Vorlage stand das Modell erst direkt auf den QR. Da das aber nicht
praktikabel ist, habe ich eine Verstärkung eingeklebt und die QR
abgeschnitten.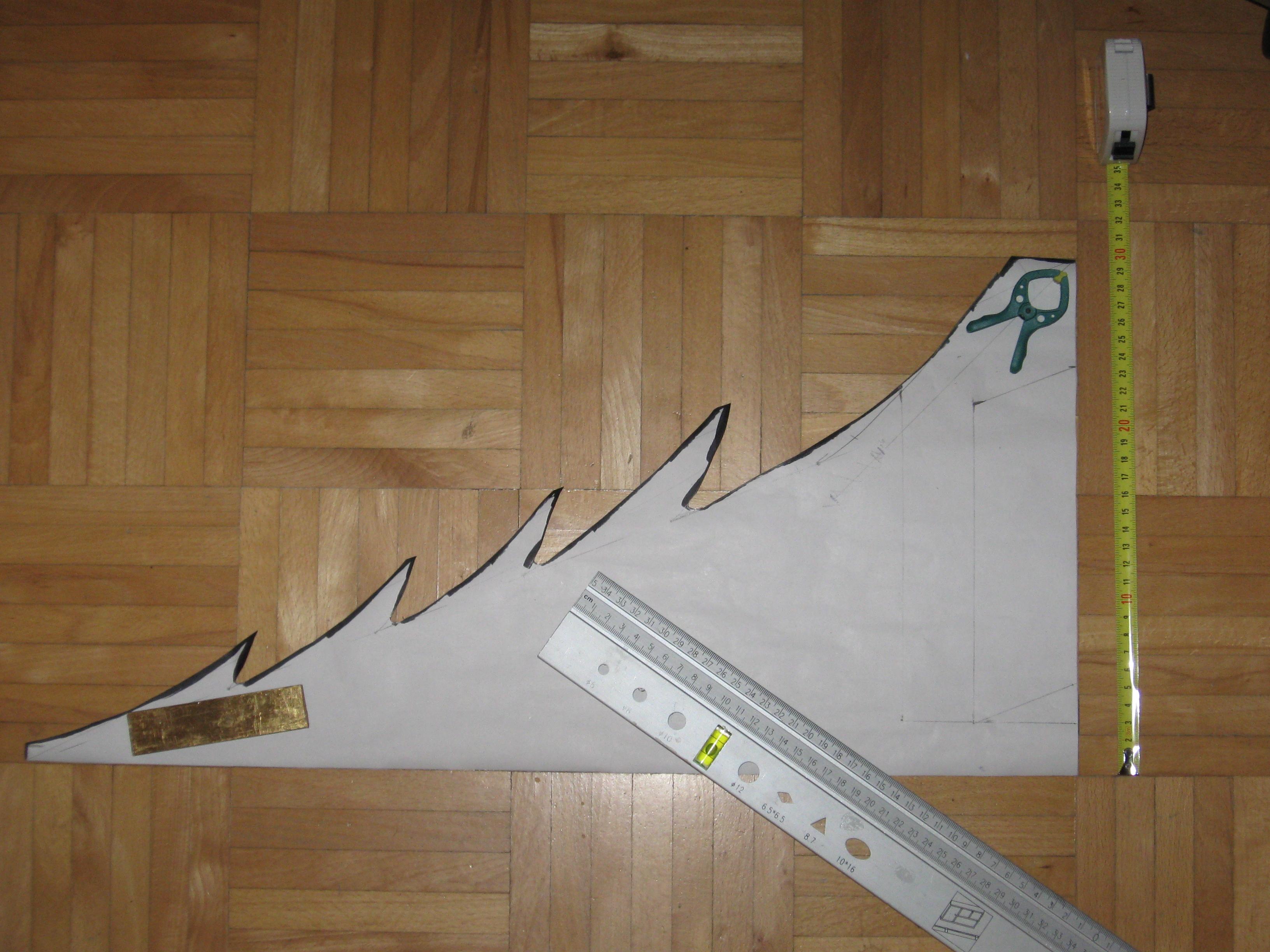 Falls es jemand nachbauen will. Volle
Größe.
Falls es jemand nachbauen will. Volle
Größe. Mit Nachtflugbeleuchtung.
Evt. brauche ich jetzt einen größeren Prop, da der Schub
schnell zu wenig wird. Und einen stärkeren Motor. Mit Farbe,
zusätzlichen Verstärkungen, Beleuchtung, Verkabelung und
RC-Schalter habe ich 40-50g zusätzliches Gewicht "gewonnen".
Dafür ist der bisherige Motor zu schwach. Nach einigem Schweben
ist er sehr heiß. Der Schalter flog wieder raus. Nach
Störungen fliege ich das Modell jetzt mit 2G4.
Mit Nachtflugbeleuchtung.
Evt. brauche ich jetzt einen größeren Prop, da der Schub
schnell zu wenig wird. Und einen stärkeren Motor. Mit Farbe,
zusätzlichen Verstärkungen, Beleuchtung, Verkabelung und
RC-Schalter habe ich 40-50g zusätzliches Gewicht "gewonnen".
Dafür ist der bisherige Motor zu schwach. Nach einigem Schweben
ist er sehr heiß. Der Schalter flog wieder raus. Nach
Störungen fliege ich das Modell jetzt mit 2G4.Ausgemusterte und verkaufte Modelle:
nach obenPyra (Eigenentwurf) [-2]
 Rakete,
Depron, QHSM
Rakete,
Depron, QHSM| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 45cm |
80cm |
~300g |
dm2 |
g/dm2 |
AXI 2208/34 | 9x4,7" |
3x640-900 |
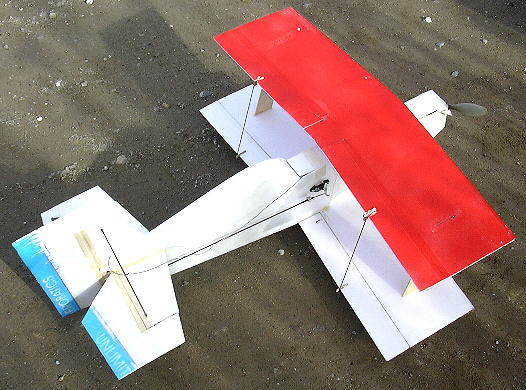
 Die ersten Flugversuche waren ziemlich gut. Das Hovern ist ähnlich
wie bei einem Shocky, eher noch einfacher. Der Rundflug ist einfach bis
auf die Orientierung. Durch die symmetrische Form kann man ganz neue
Flugmanöver ausführen. Z.B. kann man eine Kurve fast ohne
Querruder/Höhenruder fliegen, das Seitenruder reicht völlig
aus. Den Mischer habe ich aber noch nicht so hinbekommen, daß ich
nicht doch ein wenig mit dem Querruder stützen müßte.
Looping und Turn sind problemlos, Rollen sehr schnell. Der
Übergang vom Rundflug zum Hovern ist nicht so einfach, da man beim
Bremsen leicht einiges an Höhe macht, und das Runterschweben ist
etwas heikel. Ich fliege dazu jetzt möglichst niedrig an. Die
Eigenstabilität ist natürlich sehr gering, d.h. man muß
(ähnlich wie beim Hubschrauber) ständig die Fluglage
kontrolliern und korrigieren - auch im Vorwärtsflug. Kurven mit
QR/HR sind schwierig. Einerseits wegen der schnellen Rollen,
andererseits wegen der Orientierung. Beim Start habe ich nicht das von
anderen festgestellte unruhige Verhalten in Bodennähe beobachtet.
Man sollte trotzdem beherzt abheben. Wenn nicht alle Füße
vom Boden frei sind, dienen die restlichen als Drehpunkt (bei rauhem
Untergrund) und können zum Umkippen führen.
Die ersten Flugversuche waren ziemlich gut. Das Hovern ist ähnlich
wie bei einem Shocky, eher noch einfacher. Der Rundflug ist einfach bis
auf die Orientierung. Durch die symmetrische Form kann man ganz neue
Flugmanöver ausführen. Z.B. kann man eine Kurve fast ohne
Querruder/Höhenruder fliegen, das Seitenruder reicht völlig
aus. Den Mischer habe ich aber noch nicht so hinbekommen, daß ich
nicht doch ein wenig mit dem Querruder stützen müßte.
Looping und Turn sind problemlos, Rollen sehr schnell. Der
Übergang vom Rundflug zum Hovern ist nicht so einfach, da man beim
Bremsen leicht einiges an Höhe macht, und das Runterschweben ist
etwas heikel. Ich fliege dazu jetzt möglichst niedrig an. Die
Eigenstabilität ist natürlich sehr gering, d.h. man muß
(ähnlich wie beim Hubschrauber) ständig die Fluglage
kontrolliern und korrigieren - auch im Vorwärtsflug. Kurven mit
QR/HR sind schwierig. Einerseits wegen der schnellen Rollen,
andererseits wegen der Orientierung. Beim Start habe ich nicht das von
anderen festgestellte unruhige Verhalten in Bodennähe beobachtet.
Man sollte trotzdem beherzt abheben. Wenn nicht alle Füße
vom Boden frei sind, dienen die restlichen als Drehpunkt (bei rauhem
Untergrund) und können zum Umkippen führen.Die Spitze habe ich mit GfK verstärkt, so hält sie jetzt auch leichtere Crashes und Umfaller gut aus. Die CfK Stangen sind so wie am Bild nicht günstig und reißen leicht aus. Da habe ich jetzt als Basis eine eine flächige Verstärkung aus Balsa ergänzt.
Die Motorbefestigung ist ein Schwachpunkt. Ich habe jetzt einen Magnum Motor gekauft, der eine 3armige Befestigung hat, damit ist die Montage leichter. Allerdings sind die Herstellerangaben weit entfernt von der Realität.
Außerdem habe ich noch Stäbe oben ergänzt, die das Modell beim Umkippen abfangen, ohne das es auf den Motor fällt. Leider sind sie etwas schwach, bei einem schwereren Absturz brechen sie.
Nach wiederholten Abstürzen habe ich sie außer Dienst gestellt. Das Modell war wohl zu spitz. Eine flachere, breitere Konstruktion ist nicht nur am Boden stabiler.
Ultimate (privat) [-2]

 Depron,
QHSM, Reste entsorgt
Depron,
QHSM, Reste entsorgt
| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 61cm |
65cm |
~300g (150g nur mit Servos) |
dm2 |
g/dm2 |
EFlite Park 370-1360 |
7x4" |
3x640 |
Mit dem größeren AXI2212/34 habe ich das Modell mit Ski und mit Schwimmern verwendet. Vom Gewicht her sollte ein 2208/34 genauso reichen. Inzwischen nur noch mit einem Bürstenmotor und Schwimmern (siehe dort).
Anscheinend war die Belastung schließlich doch etwas zu hoch. Der Regler hat im Flug erst durchgeschaltet, dann fiel das BEC aus und der Flieger vom Himmel :-) Da brushless immer billiger wird, baue ich wieder einen BL ein. Den Propeller habe ich jetzt relativ klein gewählt, so ist der Strom im gesunden Bereich (<10A).
Nach dem letzten Absturz hatte ich keine Lust mehr auf Reparaturen und habe die Reste entsorgt.
Quasar (Topmodel)
[0]
 3D-Modell, Depron, QHSM, verkauft
3D-Modell, Depron, QHSM, verkauft| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 88cm |
99cm |
275g |
20,4dm2 |
g/dm2 |
AXI2208/34 | 9x3,8" |
3x600-800 |
Soll angeblich F3AI Flug in der Halle erlauben, etwas schwerer als ein Shocky.
Das Modell kann sehr langsam fliegen, ebenso geht das Hovern sehr einfach. Nach Anleitung hatten die Anlenkungen für das Heck aber nicht genug Ausschlag. In der Halle hat es nicht ganz für einen Looping gereicht, deshalb die Reparatur am Bug. Die Verspannung ist einfach und hält recht gut, allerdings sind die Flügelstreben viel zu schwach und die Flächen könnten auch eine Verstärkung vertragen.
Ein leichterer Motor und Regler wäre wahrscheinlich besser. Mit einem Hacker A20-34S und einen 8A Regler an 2s1p 640 und 8x3,8" bin ich nicht zurechtgekommen. Mit 2 Zellen war der Schub zu gering und mit 3 Zellen wohl die Drehzahl zu hoch. Ich bin jetzt wieder beim AXI2208/34 mit 9x3,8" und 3Lipo. 340er haben aber einen zu hohen Innenwiderstand - Hovern gerade so und nur die halbe Flugzeit lang. Mit einem 640er dagegen geht das Modell richtig gut. Nach einigen rauhen Landungen sind die Flächen trotz Verspannung nicht mehr wirklich fest, d.h. sie wackeln deutlich. Mögliche Verbesserungen sind ein Querholm wie beim Shocky und CfK Stäbe statt der Schnüre. Die Flügelstreben haben noch eine Holzverstärkung bekommen. Die Akkubefestigung gefällt mir auch noch nicht.
Zwischenzeitlich werkelte ein MPX BL22... mit 3x640. Das geht gut, der Motor wird aber recht heiß. Evt. könnte eine bessere Kühlung reichen.
nach oben
3D2 (ebay) [0]
 Depron,
3D, QHSM, verkauft
Depron,
3D, QHSM, verkauft
| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| cm |
cm |
208g |
dm2 |
g/dm2 |
Nano Grau |
8x3,8 |
3s360 |
Das Modell fliegt sehr neutral. Einen Namen hat der Verkäufer nicht angegeben. Einige nette Ideen bei den Anlenkungen.
Brick (eig.)
[-2]
 3D-Modell, Depron, QHM, zerlegt
3D-Modell, Depron, QHM, zerlegt| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 25cm |
50cm |
160g |
dm2 |
g/dm2 |
Roxxy 1820 |
7x3,5" |
2x350 |
 Die
Anlenkungen habe ich noch ergänzt um Ruder oben und unten zu
haben. Leider hat das nicht wirklich eine Verbesserung gebracht und ich
gebe das Projekt auf.
Die
Anlenkungen habe ich noch ergänzt um Ruder oben und unten zu
haben. Leider hat das nicht wirklich eine Verbesserung gebracht und ich
gebe das Projekt auf.nach oben
Knuffel (Slowflyer.de) [-2]
 Depron, QHSM, 3D, zerlegt
Depron, QHSM, 3D, zerlegt| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 83cm |
85cm |
158g |
dm2 |
g/dm2 |
Nano Red |
8x4,3" |
2x350 |
 Inzwischen hab ich ihm noch SFG (side force generators) oder einfacher
Winglets weiter innen verpaßt. Damit wird der Messerflug noch
einfacher.
Inzwischen hab ich ihm noch SFG (side force generators) oder einfacher
Winglets weiter innen verpaßt. Damit wird der Messerflug noch
einfacher.Nach einigen weiteren Beschädigungen hatte ich keine Lust mehr ihn zu reparieren. Die RC-Teile sind jetzt im Morback.
Weihnachtsbaum Version 1 (eig)
[-2]
 Senkrechtstarter, Depron, QHSM, ausgemustert
Senkrechtstarter, Depron, QHSM, ausgemustert| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 115cm |
90cm |
480g |
36dm2(?) |
g/dm2 |
OK-C2830-B |
11x3,8"(10 wäre besser) |
3x600-950 |
Der momentane Antrieb ist fast zu stark. Das Gewicht könnte man wohl noch etwas verringern. Leider ist er extrem sperrig. Daher ist alles aufs Zerlegen ausgelegt.
Der Erstflug hat gemischte Ergebnisse hinterlassen. Der Antrieb reicht gut aus. Der senkrechte Start machte keine Probleme. Der Schwerpunkt (geschätzt) war brauchbar. Die Sicherheitsverlagerung nach vorne sollte wohl weg. HR und SR reagieren ausreichend. Das QR dagegen wirkt zwischen gar nicht und minimal. Entweder dreht er gar nicht oder extrem langsam (ca. 20sec/360° ?). Evt. tritt hier eine Art Flettnerruder Effekt ein. D.h. das angelenkte Ruder verbiegt den Rest gegensätzlich. Daher habe ich die Flüge fast ausschließlich mit HR/SR durchgeführt.
Die erste Landung horizontal im Schnee war weitgehend schadlos. Die zweite ging fast senkrecht. Beim dritten Mal leider ein Absturz. Eine plötzliche Bewegung um die Querachse konnte ich nicht mehr ausgleichen und es ging senkrecht in den Boden. Die Schäden sind noch reparierbar.
Nachdem der WB2 gut funktioniert, und der WB1 doch einige Schwächen aufweist, werde ich das Projekt nicht weiterverfolgen.
Extra (E.Gaksch) [-2]

 Depron,
3D, ähnlich
Shockflyer, QHSM
Depron,
3D, ähnlich
Shockflyer, QHSM
| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 80cm |
75cm |
(128g)137g?(2s250) |
dm2 |
g/dm2 |
AXI2203/46 |
8x3,8 |
2s250-460 |
Das Modell ähnelt sehr dem Shockflyer. Ich habe auch
einige Teile (Anlenkung, Verstrebung) von diesem Modell
übernommen. Mein Augenmerk lag auf niedrigem Gewicht. Allerdings
habe ich bei einigen Punkte doch lieber mehr Stabilität und
leichtere Austauschbarkeit mit etwas mehr Gewicht bezahlt.
Beim Antrieb bin ich mir noch nicht ganz sicher. Mit 2 Zellen ist der
maximale Schub des Cyclon Motors etwas gering. Mit älteren 2s350
geht kaum das
Hovern. Mit 3 Zellen dagegen muß man schon sehr vorsichtig mit
dem Gas sein, außerdem gibt das wieder mehr Gewicht. 3s300
Polyquest sind ein brauchbarer Kompromiß. Das
Fliegen ist schon wesentlich leichter und sauberer als mit meinem x-mal
geflickten und verzogenem Shockflyer.
Den Cyclon Motor habe ich gegen einen noch leichteren AXI 2203/46
getauscht. Da dieser eine höheren kV Wert hat, passen die 2s Lipos
jetzt genau. So ist das Gewicht wieder einmal gesunken. Außerdem
reichen leichte 2s250 Akkus, zumindest in der Halle völlig
ausreichend. Dieser Motor ist sehr gut aber leider auch recht teuer.
 Das letzte Hallenfliegen hat einige Schäden
verursacht. Als Folge habe ich auch ein paar Modifikationen vorgenommen.
Das letzte Hallenfliegen hat einige Schäden
verursacht. Als Folge habe ich auch ein paar Modifikationen vorgenommen.
Die Flügelenden wurden erneuert. Das weiße Depron hat den
optischen Eindruck verändert.
Der Bug wurde aus EPP geschnitten. Ähnlich wie beim Original
Knuffel sollte
so die Crashresistenz steigen. Das Gewicht ist fast gleich geblieben.
Ich habe jetzt mal den Hacker A10-15S getestet (7x3,5" 2s250-350,
140-150g). Der Schub war bescheiden. Mit dem stärkeren Akku
braucht man etwa 80% Gas zum Hovern mit geringer Reserve zum
Wegsteigen. Evt. geht es mit einem deutlich leichteren Modell besser.
 Das
Modell wurde schließlich doch ausgemustert. Beim Pylonfliegen
wollte es öfter mal vom Kurs abweichen. Das hätte einige
Verstärkungen erfordert. Also habe ich mich beim letzten
Fuchsjagd/Combat nicht zurückgehalten :-)
Das
Modell wurde schließlich doch ausgemustert. Beim Pylonfliegen
wollte es öfter mal vom Kurs abweichen. Das hätte einige
Verstärkungen erfordert. Also habe ich mich beim letzten
Fuchsjagd/Combat nicht zurückgehalten :-) Das halbe Höhenruder ist hier noch mit etwas Klebeband gehalten - geflogen ist es so noch. Aber etwa 5 Jahre sind genug.
Für die Indoor Pylonrennen habe ich einen noch vorhandenen Ikarus Superstar aufgebaut.
Micro Ultimate (Elektrofly) [0]
 (@) Depron, QHSM, verkauft
(@) Depron, QHSM, verkauft| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 29cm |
38cm |
50-80g (leer 28g) |
dm2 |
g/dm2 |
2s 100-300 |
Morback F3P (Internet) [-2]
 Depron, QHSM, zerlegt
Depron, QHSM, zerlegt| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 88,5cm |
94cm |
159g(leer) 182g |
dm2 |
g/dm2 |
Nano Red |
8x4,3" (8A) |
2s 350-500 |
Die neuerlichen Reparaturen und Verstärkungen haben das Gewicht erhöht. Aufdoppelungen, Kleber und mehr CfK Streben. Das Flugverhalten ist trotzdem noch sehr gut. Man sieht dem Entwurf an, daß er für ein VPP Modell gedacht war (vielleicht mal in der Zukunft). Bei einem Neubau könnte man einiges modifizieren, z.B. den Bug.
Das Modell wurde außer Dienst gestellt um die Teile für andere Modelle zu nutzen.
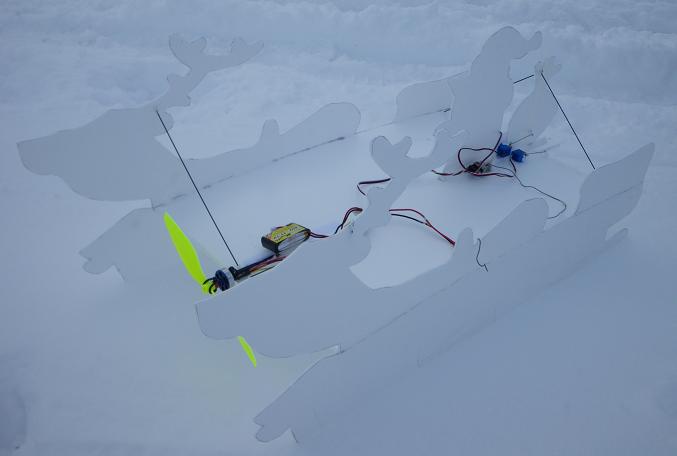
Santas Schlitten (eig.) [-2]
 Depron, QHSM, verschrottet
Depron, QHSM, verschrottet
| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 35cm |
83cm |
220g ? |
dm2 |
g/dm2 |
Nano |
8x4,3" |
3s ? |
Seitenteile aus 3mm Depron werden durch eine Platte mit 6mm verbunden. Der Motor zeigt etwas hoch. Der Sack des Weihnachtsmanns als SR. Die Grundplatte habe ich gebogen eingebaut um näher an eine Tragfläche zu kommen. Evt. war das eine schlechte Idee. Das Flugverhalten ist grausig. Evt. paßt auch der Schwerpunkt noch nicht, obwohl ich zuletzt den Akku plus einen zweiten ganz vorne hatte. Selbst damit war die Manövrierbarkeit eher zufällig und erinnerte an das ebenfalls fehlgeschlagene Projekt Backstein. Da es schon kurz vor Weihnachten ist, werde ich das Projekt wohl zumindest für heuer aufgeben oder mir für nächstes Jahr den Frästeilsatz bestellen.
Yak54 (E.Gaksch) [-2]
 Depron,
3D, Shockflyer, QHSM, ausgeschlachtet
Depron,
3D, Shockflyer, QHSM, ausgeschlachtet
| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 85cm |
cm |
143g ohne Akku, 168g (zu Beginn, jetzt mehr) |
dm2 |
g/dm2 |
Nano Red |
8x3,8" |
2s360-550 |
Dieses Modell wurde auch im Wettbewerb (F3P) benutzt.
Ich habe ein paar Änderungen gemacht. Die Flächenvorderkanten sind aufgedoppelt (2x3mm, war vor einigen Jahren mal Mode), die HLW Vorderkante ebenfalls (1x3mm). Die Fläche hat vorne und hinten CFK Flachstäbe (3x1 und 3x0,5mm). Seilanlenkung. Das QR Servo ist relativ schwer um die großen Ruder auch sicher beherrschen zu können.
Die vorgegebene Position der SR Anlenkung paßt nicht. Sie ist zu hoch. An dieser Position kommt sie in Konflikt mit dem HR, außer man sieht nur sehr kurze Hebel vor (?). Einige der grauen Teile habe ich aus weißem Depron nachgeschnitten, um etwas Kontrast in die Optik zu bringen.
Das Modell fliegt ausgezeichnet. Sehr schnelle Rollen, ruhig im Messerflug.
Nach dem letzen Hallenfliegen war die Schnauze stark lädiert. Ich habe sie jetzt durch EPP ersetzt. Zusammen mit weiteren CfK Verstärkungen wurde die YAK dadurch 4g schwerer. Die QR haben sich im Sommer verbogen und wurden getauscht.
Für die neue Saison habe ich einige Stellen geklebt und geschient. Das Modell fliegt wieder, ist aber nochmals schwerer (161g ohne Akku). Hovern geht nur noch gerade so. Eine weitere Reparatur wird es nicht geben. Beim letzten Hallenfliegen hat sie sich aber gut geschlagen und ist jetzt wieder aufgerückt :-)
Und jetzt doch der Weg zum Ende :-) Ich hätte ihn lieber bei einem Crashfliegen vernichtet, aber die Servos wurden gebraucht. Könnte aber sein, daß ich irgendwann mal wieder einen baue.
Spark Lookalike (modellbau-jonny.at) [-2]
 Depron, QHSM, ausgeschlachtet
Depron, QHSM, ausgeschlachtet| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 100cm |
100cm |
163g(leer) 197g |
23dm2 |
8,6g/dm2 |
Nano Red |
8x4,3" |
2s 350-500 |
 Nachdem
ich nicht so glücklich mit den Seilanlenkungen war, hier mal
wieder eine Gestänge (1,5mm CfK) Anlenkung. Das QR hat noch zu
wenig Ausschlag. Da nur D47 Servos verbaut sind, möchte ich einmal
die Direktversorgung testen, d.h. die Servos werden direkt vom Akku
versorgt.
Nachdem
ich nicht so glücklich mit den Seilanlenkungen war, hier mal
wieder eine Gestänge (1,5mm CfK) Anlenkung. Das QR hat noch zu
wenig Ausschlag. Da nur D47 Servos verbaut sind, möchte ich einmal
die Direktversorgung testen, d.h. die Servos werden direkt vom Akku
versorgt.Evt. kann man auch noch an der Verkabelung sparen.
Die Depronkufen wurden durch richtige Räder ersetzt.
Auch dieses Modell ist schwerer geworden und nicht mehr wirklich spritzig mit dem Motor.
Wegen der Teile ausgeschlachtet. Das Material war auch schon ein wenig brüchig.
Malibu F3P (Pichler) [-2]
 Depron, QHSM, F3P, ausgeschlachtet
Depron, QHSM, F3P, ausgeschlachtet| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 85cm |
cm |
160g (131g leer) |
dm2 |
g/dm2 |
Roxxy1820/10 |
8x4,3" |
2s400 |
Noch ein F3P Modell. Es fliegt ausgezeichnet. Man kann es sehr langsam machen, Messerflug braucht kaum Rudereinsatz. Der angegebene Schwerpunkt ist mir zu weit vorne 10-15mm weiter hinten sind angenehmer. Das Modell will genau gesteuert werden, da es einfach in der gewählten Richtung weiterfliegt. Dafür kann man ohne Probleme eine flache Kurve nur mit SR fliegen.
Der Motor(15g Pichler) ist bei dem Gewicht an seiner Grenze. Hovern geht, das Raussteigen ist eher zäh. Wenn der Akku dem Ende zugeht, ist es auch mit dem Hovern zu Ende. Die angeblichen 15g sind leider in der Realität 18g. Dazu kommt dann noch der praktisch obligatorische Motorhalter auch mit ein paar Gramm. Dessen Madenschrauben brauchen einen sehr kleinen Inbus und lockern sich leicht. Das Material ist etwas weicher als Depron und trotzdem recht brüchig.
 Ich
bin in einigen Bereichen von der Anleitung abgewichen. Diese ist eher
mies. Die Bilder sind klein und schlecht gedruckt, der Text zu wenig.
Wichtige Punkte (z.B. Ruderanlenkungen) kommen fast nicht vor.
Ich
bin in einigen Bereichen von der Anleitung abgewichen. Diese ist eher
mies. Die Bilder sind klein und schlecht gedruckt, der Text zu wenig.
Wichtige Punkte (z.B. Ruderanlenkungen) kommen fast nicht vor.Für die QR habe ich die Ikarusbeschläge genommen. Laut Anleitung wären die Servos ein gutes Stück weiter hinten. Auch so muß der Akku weit nach vorne zum Motor. Das QR Servo laut Anleitung hat den Hebel zu hoch. Entweder ein Loch in der Fläche oder das Servo umdrehen. Die HR/SR Anlenkungen sind aus 1mm CfK, das an 4 Stellen abgestützt wird.
Die Depronversteifung habe ich weggelassen und stattdessen mein übliches Gitterwerk benutzt (0,8mm und 1mm CfK). Bei der Überlappung Fläche zu Rumpf habe ich etwas Material entfernt, bringt aber nur etwa 0,7g. Auch der Motorspant ist nicht original.
Die Aussparungen in den Depronteilen, die für einen guten Sitz und leichten Zusammenbau sorgen sollen, sind viel zu wenige. Das Unterteil hat gerade mal eine Stelle und auch oben gibt es weite Bereiche ohne Führung. Dadurch wird ein gerader Zusammenbau recht mühselig. Das wäre nicht mal ein Mehraufwand.
Das sich ergebende Gewicht entspricht der Herstellerangabe. Dabei habe ich aber die ganzen Holzteile und Aufdopplungen im Bugbereich weggelassen.
Nach einer Empfehlung aus dem Netz habe ich den Roxxy 1820/10 getestet und bin sehr zufrieden damit. Nachdem er schon an einer 7x3,5" 7A zieht, wird er hier mit der 8x4,3" den Regler wohl schon einigermaßen fordern. Außerdem läuft der Motor nur unwillig an. Entweder kann man das mit Motoreinstellungen korrigieren oder ich brauche einen stärkeren Regler. Der 1820/12 ist besser.
Das letzte Hallenfliegen brachte starke Beschädigungen im Bugbereich nach einem Flugfehler. Ich habe die vorhandenen Teile zusammengeklebt, das scheint soweit zu halten.
Da ich dieses Modell noch am meisten getestet habe, bin ich damit beim F3P Einsteiger Programm angetreten. Neben Problemen mit Aufregung und Flugtechnik hat sich vor allem das Gewicht als zu hoch erwiesen. Ich mußte doch sehr schnell fliegen. Das (Original) Fahrwerk hat gerade so gereicht zum Abheben.
Das HR/SR Gestänge wog 3,5g incl. Ruderhebel. Wegen Gewicht und Materialermüdung abgewrackt.
Malibu R (RK) [-2]
 Depron, QHSM, F3P, abgewrackt
Depron, QHSM, F3P, abgewrackt| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 85cm |
cm |
165g (141g ohne Akku) |
dm2 |
g/dm2 |
Roxxy 1820/12 |
8x4,3" |
2s350 |
Die Basis bildet ein Plan des Malibu F3P V2. Das QR Scharnier ist jetzt im 90° Winkel, ebenso das SR Scharnier. Die QR sind ein wenig größer, es wurden weitere größere Winglets und Bremsen ergänzt. Das Cockpit ist höher.
Der Rohbau ist nur wenig schwerer als bei der V2. Anlenkung mit Stäben. Das Gesamtgewicht ist recht hoch ausgefallen. Nach Addition aller bekannten Teile ist mir nicht ganz klar, woher das ganze Gewicht stammt. Die Servoanlenkung ist weit nach innen gelegt und sollte direkt an den Rumpfteilen angeklebt werden. Das geht sich aber nicht ohne Krümmung aus. Also freie Abstützungen.
Der Erstflug war recht erfolgreich. Der Schwerpunkt paßt mit dem Akku vorne im Bugbereich. Ruderreaktion OK, Messerflug sehr gut, langsam senkrecht abwärts. Allerdings ist der Antrieb durch Gewicht und die ganzen Bremsen ziemlich am Limit. Außerdem dröhnt etwas lästig. Außer bei der Power merkt man das Gewicht nicht. Leider war das SR mies. Einerseits hat die Anlenkung etwas nachgegeben, andererseits hatte das Servo viel Spiel und bei näherem Test auch Karies. Ich habe jetzt dort ein besseres eingebaut und die Führung der Anlenkung fester gemacht. Außerdem habe ich die fehlende Abstützung der Flächenstreben ergänzt. Aufgefallen ist mir der 0,8x3mm CfK Holm, der wie beim Vorbild nicht bis ganz an die Flächenspitze geht. Ich weiß nicht, ob sich das auswirkt. Bei einer Weiterentwicklung würde das aber geändert.
Das SR geht immer noch nicht gescheit, vermutlich brauche ich doch eine Seilanlenkung und entferne evt. die Bremse. Oder ich nehme eine dickere Anlenkung, was natürlich wieder das Gewicht erhöht. Auch das Dröhnen ist noch da. Außerdem ist das Gewicht einfach zu hoch. Das Fahrwerk ist in der Halle zu kurz für einen Start.
Die Teile werden für andere Modelle verwendet.
Malibu F3P V2 (TechOne) [0]
 Depron, QHSM, F3P, verkauft
Depron, QHSM, F3P, verkauft| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 85cm |
cm |
146g (123g ohne Akku) |
dm2 |
g/dm2 |
Roxxy 1820/12 |
8x3" |
2s350 |
Die weiterentwickelte Version mit ausgefräßten Teilen. Das Teilegewicht ist aber nicht geringer als bei der alten Version !? Das Material scheint deutlich schwerer als bei der V1. Ich habe versuchsweise das SR aus Depron nachgeschnitten und kam ohne Ausfräsungen auf 10% Mehrgewicht zum Original. Rein vom Volumen wären eher 33% zu erwarten gewesen. Wenn man bedenkt, daß die Haut normalerweise deutlich schwerer ist als das Innenmaterial, sogar noch mehr.
 Ich habe einige Änderungen zum Gewichtsparen vorgenommen.
Ich habe einige Änderungen zum Gewichtsparen vorgenommen. Die obere Depronversteifung fehlt. Nur 0,8mm CfK Streben, Fahrwerk anders, andere Motorbefestigung. Das Depron bei den Flächenstreben fehlt.
Die HR/SR Servos sind wesentlich weiter vorne. Auch so muß der Akku weit vorn sein. Die QR Anlenkung habe ich nach oben verlegt, so ist unten mehr Platz.
Der erste Flugtest war nur teilweise erfolgreich. Langsamflug und Messerflug OK, Rollen schnell genug.
Die Motorleistung ist etwas mau. Es reicht zum Hovern, aber kaum mehr. Das HR wirkt schwach und ungleichmäßig. Evt. rutscht die Schnur durch !? Dadurch hatte ich eine etwas harte Landung. Der Bug ist schadlos, aber der Rumpf ist hinter der Fläche gebrochen - repariert.
Das "Depron" hat eine komische, sehr glatte und feste Beschichtung. Selbstklebendes Klettband hält erstmal, löst sich aber schnell wieder. Auch Belizell hat nicht geholfen. Oberfläche abschaben und UHU-Por wirkt etwas besser, aber auch nicht perfekt. Bleibt noch Sekundenkleber. Jemand hat vorgeschlagen, das Klettband mit Schnur förmlich anzunähen und die Schnur dann mit Sekundenkleber zu fixieren.
Die Seilanlenkung (wie vorgesehen) geschah nur aus Gewichtsgründen. An sich bevorzuge ich eine Stabanlenkung. Auch mit fixiertem Seil habe ich eine Hysterese am HR !? Ich werde noch versuchen, die Hebel am Ruder zu verlängern, damit sie die gleiche Länge wie am Servo haben. Wenn das auch nicht hilft, gehe ich über zur Stabanlenkung.
Auch der 2. Versuch mit dem Roxxy 2214/31(119g leer) war eher enttäuschend, daher wechsle ich jetzt auf einen 1820/12 (~+2g). Das Flugverhalten war aber sehr angenehm.
Leider war der 1820/12 eine Enttäuschung. Obwohl besser als der Vorgänger, war die Leistung doch eher begrenzt. Dazu könnte auch der schlechte Propadapter beigetragen haben, der bei Vollgas nicht mehr recht hält und zu Geräuschen führt - Zumindest mit dem üblichen GWS Prop. Der 1820/10 hat einen anderen (neueren?) Propadapter, der besser paßt. Also wirds noch ein neuer Motor :-(
Die Seilanlenkungen habe ich geändert. Die Ruderhebel wurden durch CfK Stäbe verlängert. Ich muß das Seil am Servohebel mit Klebeband fixieren. Auch so sind die Ausschläge nicht ganz so wie gewünscht.
Also werde ich das Modell vielleicht für einen Test nutzen. Ich ersetze die Seilanlenkung durch eine Stabanlenkung, wie sie bei der V1 gut funktioniert, und weiß dann genau, wie sich das auf das Gewicht auswirkt.
Erstmal aber der 1820/10 und die Seile an den Servohebeln angeklebt. Damit konnte ich recht schön fliegen. Den Motor habe ich zwar vom anderen Malibu noch etwas spritziger in Erinnerung, allerdings war es auch recht kalt. Flugverhalten jetzt so wie man es sich wünscht. Ich muß noch Vergleichsfliegen, aber mir kommt das Flugverhalten der V2 gegenüber der V1 etwas besser und harmonischer vor. Er ist nicht ganz so fixiert in seiner Ausrichtung.
Das Höhenruder hat nicht den vollen Ausschlag, weil das Servo schon anfängt zu summen, aber genug Wirkung.
Ich muß vorsichtig sein bei Vollausschlag von HR und SR. Das HR hat sich in der SR Anlenkung verhakt und blockiert.
Ich bin die 2 Malibus jetzt im Vergleich geflogen und konnte eigentlich keine nennenswerten Unterschiede erkennen. Hauptsächlich die Ruderwirksamkeit, die aber mehr an den Anlenkungen und der Einstellung liegt.
Wenn die Diät beim Sirius11 gut wirkt, werde ich sie evt. auch hier durchziehen. Es wird aber wohl trotzdem etwas schwer bleiben. -> Da das Modell doch deutlich schwerer als die aktuellen Modelle ist, wird es keine Diät geben. Ich nehme es nur noch als Reserve und Trainingsmodell für Draußen.
Der 1820/10 war zu aggressiv. Jetzt wieder ein 1820/12, der sehr gut geht. Die Leistung ist eher zu hoch, Flugzeit reicht.
Micro Shocky (?) [-2]
 Depron/EPP, QHSM, abgewrackt
Depron/EPP, QHSM, abgewrackt| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 40cm ? |
cm |
24g ? |
dm2 |
g/dm2 |
2g ? |
1s150 |
SU-29 (showfly.at) [-2]
 Depron,
3D, Shockflyer, QHSM, abgewrackt
Depron,
3D, Shockflyer, QHSM, abgewrackt
| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 83cm |
cm |
107g leer, 130g (2s350) |
dm2 |
g/dm2 |
Roxxy1820/10 | 8x3,8" |
2s350-450 |
Eine Konstruktion von Alexander Balzer. Nur Depronteile. Sollte möglichst leicht werden, daher mal wieder eine Seilanlenkung. Außerdem möchte ich hier eine 2s Versorgung der D-47 Servos ausprobieren.
 Der Erstflug fand noch ohne die 2s Versorgung statt. Die Seilanlenkungen sind
etwas lose, die Ruderwirkung trotzdem gut. Der Akku muß weit nach
hinten. Im Moment bin ich etwa in der Mitte des Flügels und
muß noch weiter nach hinten. QR Wirkung ist OK, allerdings kann
ich im Hovern kaum rollen !? Der Motor hat mit dem 7" Prop genug Schub.
Messerflug braucht nur geringe Korrekturen.
Der Erstflug fand noch ohne die 2s Versorgung statt. Die Seilanlenkungen sind
etwas lose, die Ruderwirkung trotzdem gut. Der Akku muß weit nach
hinten. Im Moment bin ich etwa in der Mitte des Flügels und
muß noch weiter nach hinten. QR Wirkung ist OK, allerdings kann
ich im Hovern kaum rollen !? Der Motor hat mit dem 7" Prop genug Schub.
Messerflug braucht nur geringe Korrekturen. Da ich gerade intensiv mit der YAK55 Rollenkreise übe, merke ich hier die feinen Unterschiede, wo man mehr oder weniger Ruder geben muß um die gleiche Reaktion zu erreichen.
Das QR Servo kommt mir etwas überfordert vor. Ein bessere digitales (siehe YAK55) kostet aber 5g Mehrgewicht. Längere Hebel würden die Kräfte auf der Anlenkungen verringern und durch die größeren Wege bei Seilanlenkungen präziser gehen, aber mehr Bauaufwand bedeuten.
Erst bei diesem Modell ist mir aufgefallen, wieviel CfK für die Verstrebungen draufgeht. Allein die Zickzack Verstrebungen brauchen bei einem üblichen Shocky etwa 3m ! Da lohnt es sich schon, dünneres Material zu nehmen - bei mir derzeit 0,8mm. Da die Belastung eigentlich nur auf Zug ist, spielt die Dicke kaum eine Rolle. Manche verwenden sogar Schnüre. Um auch auf Druck Kraft aufnehmen zu können, bräuchte man beträchtlich dickeres Material. Das ist aber dafür nicht nötig. Das Heck läßt sich auch so kaum verdrehen.
Nur die Flächenstreben sind stärker (1,5mm). 1,2mm schien mir etwas zu schwach, da hier auch Schubkräfte auftreten können. Evt. könnte man hier auch über ein dünnes Fachwerk nachdenken !? Oder zumindest die 1- 1,2mm Flächenstreben gegen die Fläche und einander abstreben.
Die dicken Klebestellen mit Belizell verteilen die Kräfte und sind leicht.
Die Ansatzpunkte sollten bewußt gewählt werden:
- weit außen, aber noch etwas Raum zur Außenkante lassen, damit der Klebepunkt mehr Fläche hat
- nah an festen Teilen, z.B. Flächenvorderkanten CfK, Fahrwerkstreben
- außen liegende Punkte einbeziehen, hauptsächlich am Heck
- Streben nicht nebeneinander verkleben sondern möglichst zusammen und kraftschlüssig
- die
Flächenstreben zusammen mit den sonstigen Verstrebungen in dem
Bereich auf einen Punkt führen. Wenn die Streben nebeneinander
liegen, kann sich der Rumpf da verbiegen und damit auch die Fläche.
- kritische Punkte einbeziehen, die stabilisiert werden sollten. Z.B. der innere Ansatzpunkt des QR oder das Scharnier des HR. Wenn sich hier was verbiegt, laufen die Ruder schlechter, außerdem treten an diesen Stellen mehr Kräfte auf.
- ich bevorzuge auch Flach-CfK an der Flächenhinterkante,
damit das QR Scharnier sich nicht verbiegen kann. Das bringt aber
Mehrgewicht und ist nicht in allen Konstruktionen machbar.
- Depronversteifungen liegen meist relativ weit innen und bringen
bezogen auf das Gewicht eher wenig für die Torsionssteifigkeit.
Gegen Biegung können sie mehr bringen, was man aber kaum braucht,
außerdem sind sie unempfindlicher beim Handling. Sie sind
schneller zu bauen und man kann Teile dahinter verstecken..
Mit dem kleinen Prop und der Depronausformung unten, kann das Modell ohne Schaden für den Prop landen. Um in der Halle aufrecht stehen zu bleiben und evt. wieder starten zu können, habe ich 2 dünne CfK Stäbe als Stützen seitlich angeklebt.
Ich habe mal das Gewicht für eine Stabanlenkung mit 0,8mm CfK und entsprechenden Führungen abgeschätzt und bin auf 1-1,5g gekommen. Da lohnt sich die Seilanlenkung für mich eigentlich nicht mehr.
Die Bemalung wieder mit Edding. Sieht nicht perfekt aus, ist aber einfach zu machen und wiegt fast nichts. Allerdings ist die Farbauswahl bei den dicken Stiften beschränkt. Ich brauche sie auch hauptsächlich zur Lageerkennung.
Maximalstrom (7x3,5") 7,2A im Stand, nach 6min Flug 8% Rest. Schwerpunkt bei ca. 45%. Der 8" Prop hat nicht wirklich viel am Flugverhalten geändert. Ich habe den Strom nicht gemessen, er dürfte aber den Regler überfordern.
Mit 2s scheinen die Servos doch erheblich schneller zu laufen. Ich habe eine 3polige Stiftleiste angelötet, bei der man mit einem Jumper auswählen kann, welche Spannung an den Empfänger geht. Anscheinend mag irgendwer die hohe Spannung nicht, auf jeden Fall schaltet der Regler nach kurzer Zeit ab, die Servos gehen noch. Entweder mag der Regler die evt. höhere Signalspannung nicht, oder der Empfänger stellt einen Spannungsabfall fest und geht in den PowerLow FailSafe. Ich werde die 2s Versorgung jetzt nur noch an die Servos leiten.
Außerdem läuft der Motor nur sehr unwillig an. Meistens muß ich ihn von Hand anwerfen. Entweder kann man das mit Motoreinstellungen korrigieren oder ich brauche einen stärkeren Regler.
Das letzte Hallenfliegen hat einige Beschädigungen verursacht, hauptsächlich durch Zusammenstöße. Die QR Hörner wurden neu eingesetzt und daneben eine CfK Verstärkung aufgeklebt. Die Servos laufen jetzt mit 2s. Das Hoververhalten hat sich etwas verbessert. Der Regler wurde getauscht, mit dem neuen ist der Anlauf sehr viel besser.
Ich habe jetzt ein 8,6g Servos für QR eingebaut, das auch sehr lange Hebelarme hat. Damit habe ich die doppelte Kraft und Ausschläge bis fast 90°. Die Reaktionen sind viel besser. Auch im Hovern habe ich jetzt einigermaßen Kontrolle. Schnelles Rollen geht im Hovern aber immer noch nicht.
Zum Test habe ich sie auf Vektor Antrieb umgebaut. Die SR Reaktion ist so natürlich wesentlich heftiger. Dafür ist das Gewicht auf 161g gestiegen, was Stromverbrauch und Leistung nicht unbedingt verbessern. Ich habe aber nicht besonders stark auf das Gewicht geachtet. Einige Gramm liessen sich wohl noch einsparen.
Indoor Hawk (robbe) [0]
 (@) Depron, QHSM, verkauft
(@) Depron, QHSM, verkauft| Spannweite | Länge | Gewicht | Fläche | Flächenbelastung | Motor | Prop | Akku |
| 100cm |
100cm |
165g |
23dm2 |
g/dm2 |
8x4,3" |
2s 350-500 |